


 下载:
下载:












-
室内污染源/危险源的定位在提升室内空气品质、防控流行病疫情、处置危险气体泄漏和应对生化恐怖袭击等方面均能发挥重要作用[1-4]。迄今为止,研究者们针对室内通风环境中的源定位问题已经开展了大量研究[5]。然而,针对未通风或通风不良的室内弱气流环境中的源定位问题,除了多年前的个别探索,鲜有研究报道[6]。在实际应用中,室内弱气流环境对应的场景十分普遍,如在过渡季节室内未通风的场景,通风空调系统发生故障的场景,在事故和灾害中通风空调系统受损的场景以及受建筑结构或家具影响形成室内风影区的场景等。在上述场景中,由于通风量不足且缺乏主导气流的输运作用,污染物或危险物质更容易积聚并达到有害或危险浓度。现有研究的不足与实际应用需求之间的矛盾凸显了在室内弱气流环境下开展源定位研究的必要性。
目前,对室内污染源/危险源进行定位的方法主要分为固定传感器网络(SSN)方法和移动机器人嗅觉(MRO)方法。SSN方法通常利用传感器读数,通过正向或反向求解室内流场和污染物扩散的基本模型(如计算流体动力学(CFD)模型和多区模型)来定位室内污染源/危险源[7-9]。由于只有当污染物/危险物扩散到监测位置,传感器才能获得其浓度读数,SSN方法也被视作为被动式方法。迄今为止,尽管SSN方法在室内通风环境的源定位研究中已经有大量报道,但尚未见有此类方法应用在室内弱气流环境中进行源定位的研究报道。近年来,尽管SSN方法的研究已经取得了很大的进展,但该类方法仍存在需要提前布置传感器,边界条件难以确定,模型求解难度大等局限。另外,室内弱气流环境由于其特殊性,也对SSN方法的研究提出了一些新挑战。例如,由于缺少主导气流且受湍流主控,污染物扩散过程的建模和求解会更加困难。此外,污染物可能需要更长的时间才能扩散到传感器所在位置,因此,也难以对突发污染作出快速响应。
与SSN方法相比,因为移动机器人具有在空间中主动搜索的能力,MRO方法也被视作为主动式方法。此类方法通常是受动物的觅食、求偶和避敌等行为启发而发展而来,因而在方法中通常会体现出仿生学原理[10-12]。与SSN方法相比,MRO方法主要有以下3点优势:机器人通过主动搜索可以更快地探测到目标污染物;MRO方法通常不需要对复杂的室内污染物扩散过程进行建模和求解;机器人可以执行多重任务,如源头控制、疏散引导、医疗救助等。综上所述,针对室内弱气流环境中的源定位问题,本文开展基于MRO方法的研究。
现有的基于MRO方法的源定位研究主要针对有主导气流的室内通风环境[5,13-24]。相比之下,只有少数研究考虑了未通风或通风不良的室内弱气流环境[6,25-30]。与室内通风环境相比,室内弱气流环境对MRO方法的挑战主要有2点:没有主导气流信息可以指导机器人连续跟踪污染物烟羽;污染物的扩散受湍流的影响更大,其浓度的波动往往会更加剧烈和频繁,从而无法形成持续指向源的浓度梯度,并由此增加机器人溯源的难度。
针对室内弱气流环境的MRO方法溯源研究,根据使用机器人的数量可分为单机器人嗅觉方法和多机器人嗅觉方法。在早期研究中,单机器人嗅觉方法因其成本低、易于实现而受到青睐。LILIENTHAL团队[22]提出了Braitenberg-type方法,FERRI团队受飞蛾等生物启发提出了Spiral方法[25]。2个团队皆通过实验验证了其所提方法在室内弱气流环境中的有效性。从这2个团队的单机器人溯源实验来看,均采用二维溯源方式,即假设源高度已知,且机器人所携带的传感器也固定在源高度上。然而,在实际应用中还普遍存在源高度未知的场景,此时二维溯源能否适用则有待于验证。
为了进一步提升源定位的成功率和效率,研究者们尝试着用多机器人嗅觉方法来解决室内弱气流环境中的源定位问题。FERRI[30]提出了1种基于家蚕行为的多机器人嗅觉方法,通过模拟室内弱气流环境对该方法进行了测试,结果表明,该方法在成功率和效率方面明显优于单机器人嗅觉方法。在这项研究之后,FERRI[27]进一步提出了1种基于粒子群优化算法的多机器人嗅觉方法(EPSO),该方法进一步加强了机器人之间的协作。尽管上述研究取得了一定进展,但是这些研究均是基于模拟的污染物浓度场开展的仿真研究,因此,不可避免地存在以下局限:在真实的室内弱气流环境中,受湍流影响,污染物的浓度会呈现出剧烈和频繁的波动,这是难以通过时均化的数值模型模拟得出的;在仿真研究中也没有充分考虑传感器的实际特性,如响应/恢复时间和检测误差;在仿真研究中也很难体现机器人之间的碰撞以及机器人运动对流场的干扰。
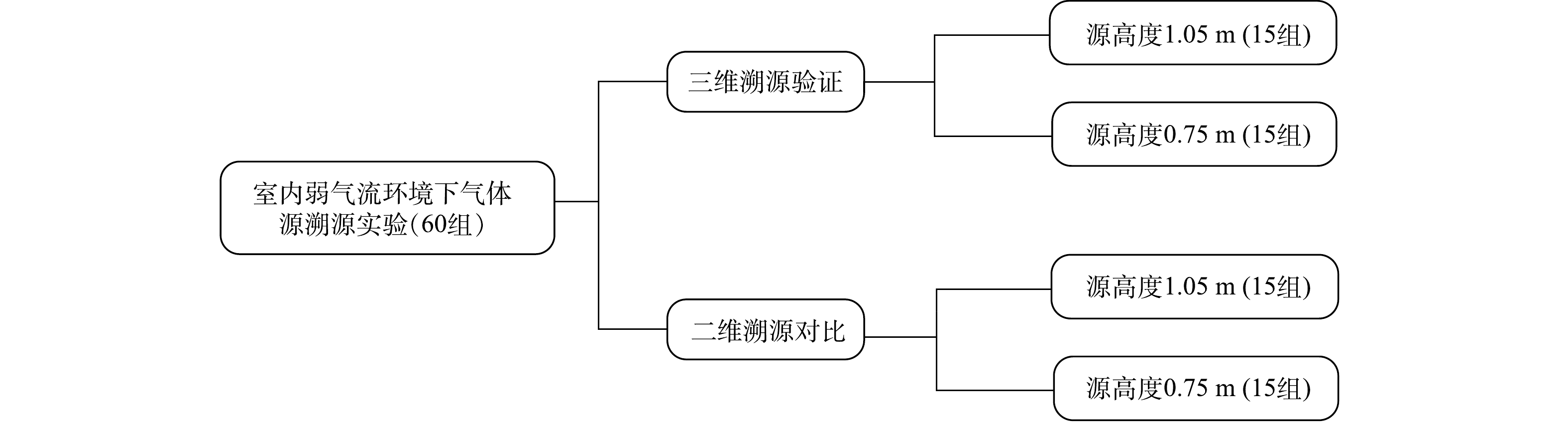
本研究的目标是在真实的室内弱气流环境下,利用基于标准粒子群算法(SPSO)的多机器人嗅觉方法(SPSO方法)来实现对源高度未知的气体污染物的溯源。虽然OSÓRIO[32]等建立了一种能够检测不同高度气味浓度和风向的机器人,但其机器人上仅是在垂直方向3个高度上携带了传感器,其传感器是固定不可受控移动的[32],而本研究中我们开发了多机器人三维溯源系统,该系统由3台传感器可以在高度方向上受控移动的三维溯源机器人组成,并且能够执行SPSO方法。在本研究中,设置了1.05 m和0.75 m 2种源高度,并在每种源高度下均开展了15组三维和二维溯源(传感器高度为1.05 m)实验,以验证三维溯源的有效性,并对比三维溯源和二维溯源的性能。
全文HTML
-
如图1所示,多机器人在源定位过程中包括3个阶段:烟羽发现、烟羽跟踪和源确认阶段。烟羽发现是源定位的开始,在此阶段机器人通过烟羽发现算法以相同的速度向各个方向发散,直到其中某个机器人检测到目标气体浓度高于烟羽发现预设浓度阈值Cmin,则所有机器人进入烟羽跟踪阶段;在烟羽跟踪阶段,机器人结合烟羽跟踪算法和获得的传感器信息去规划路径,从而接近污染源。烟羽跟踪阶段根据功能还可细分为烟羽跟踪和烟羽再发现,当机器人在跟踪烟羽的过程中丢失烟羽时,便可根据烟羽再发现重新寻回烟羽;在源确认阶段,机器人利用源确认算法判断是否到达源附近,或是陷入了局部浓度极值区域(源不在其中但浓度比周围高的区域)。如果陷入了局部浓度极值区域,则需要利用烟羽发现算法逃离,机器人逃离出局部浓度极值区后,则切换到烟羽跟踪阶段来重新寻找源。在这3个阶段中,每台机器人行进一步后,均要停留一段时间来采集浓度信息,信息采集完成后机器人会共享各自的位置和浓度信息,并根据源定位方法计算出各自下一步的目标位置。
-
本研究采用的SPSO方法主要包括3个核心算法,即烟羽发现算法、烟羽跟踪算法、源确认算法。此外,在现实的应用场景中进行多机器人源定位研究时,需考虑机器人本身以及周围障碍物的存在,所以在源定位过程中还加入了1种已知障碍物的机器人避障算法[28]。
1)烟羽发现算法。本研究所采用的烟羽发现算法为1种简单的发散搜索策略[33],通过多台机器人以相同速度向不同方向并行直线运动的形式快速捕获实验场地里目标气体的烟羽。在烟羽发现过程中,如果机器人碰到场地边界,则根据反射定律[34]改变移动轨迹。当机器人检测到的气体浓度超过Cmin,则切换到烟羽跟踪模式。
2)烟羽跟踪算法。为了进一步理解烟羽跟踪算法的实现,需要引入2个重要的概念,即全局最优值和全局最优位置。全局最优值C*(t)为到当前时刻t,机器人群检测到的最大浓度;全局最优位置
P_{\mathrm{g}}^{*}(t) 为到目前时刻t,检测到的全局最优值的机器人所在的位置。本研究所采用的烟羽跟踪算法是标准粒子群算法(SPSO),该算法是1种模仿鸟群、鱼群觅食行为发展起来的1种进化算法。该算法易于编程实现、运行效率高、参数相对较少,在源定位领域中得到了广泛的应用[5,15,27,31,35]。SPSO算法一般使用第i个机器人
R_{i}(i=1,2,3, \cdots ,N) 在t时刻测量的浓度Ci(t)作为适应度函数来评估机器人是否处于合适的位置,并指导机器人的下一步行动。本研究中N取3,3是群体的最小单位,再加上系统复杂程度和场地大小限制,最终选择既能体现算法特性,又能在极大程度上控制实现成本的3台机器人。SPSO算法中机器人Ri具有2个属性:速度和位置,速度和位置根据C*(t)不断迭代,最终得到满足终止条件的最优解。在SPSO算法中,Ri的速度向量根据式(1)进行计算。式中:Vi(t+1)为Ri在t+1时刻的速度向量;
w{V_i}\left( t \right) 为Ri以往的经验信息,{V_i}\left( t \right) 为Ri在t时刻的速度向量,w为惯性因子,表征因自身速度而产生的惯性,用于控制当前速度对于下一步速度的影响力,本研究取值为1[15];{l_{\rm{1}}}{r_1}\left( {P_i^*\left( t \right) - {P_i}\left( t \right)} \right) 表示Ri自身认知,即趋向自身探索浓度最优值的位置,Pi(t)示Ri在t时刻位置,P_{i}^{*}(t) 表示从溯源开始到t时刻Ri自身浓度最大值C_{i}^{*}(t) 对应的位置,l1为学习因子,表示Ri从自身溯源过程中学习的经验,本研究取值为2[15];{l_2}{r_2}\left( {P_{\rm{g}}^*\left( t \right) - {P_i}\left( t \right)} \right) 表示Ri之间协同合作与信息共享,其中P_{g}^{*}(t) 表示从溯源开始到t时刻机器人群检测到的浓度最大值C*(t)所对应的位置,l2为学习因子,表示Ri从群体溯源过程中所学的经验,本研究取值为2[15];r1和r2是均匀分布在0~1之间的随机数。Ri的位置更新如式(2)所示。机器人自身的局部最优位置更新如式(3)所示。机器人群的全局最优位置更新如式(4)所示。
3)源确认算法。源确认是指通过获取气味特征来确认源在机器人附近的定位过程。本研究中使用浓度极大值方法来进行源确认和结束源定位过程,即当机器人在全局最优位置
P_{g}^{*}(t) 探测到的浓度极大值C*(t)超过预设的浓度阈值Cmax时,则认为机器人到达了源附近,结束源定位过程,否则,认为机器人陷入了局部浓度极值区域。然后,机器人重启烟羽发现算法逃离局部浓度极值区域,直到检测到新C*(t)超过Cmin,则切换到烟羽跟踪模式。
1.1. 源定位流程
1.2. 源定位方法










-
如图2所示,为了验证在室内弱气流环境下三维溯源的有效性以及对比三维和二维溯源的性能,在实验开始前设置了1.05 m和0.75 m 2种源高度。在每种源高度下,分别计划开展15组三维和二维溯源实验,共计60组实验。实验过程中,二维溯源机器人传感器固定在1.05 m高度。
-
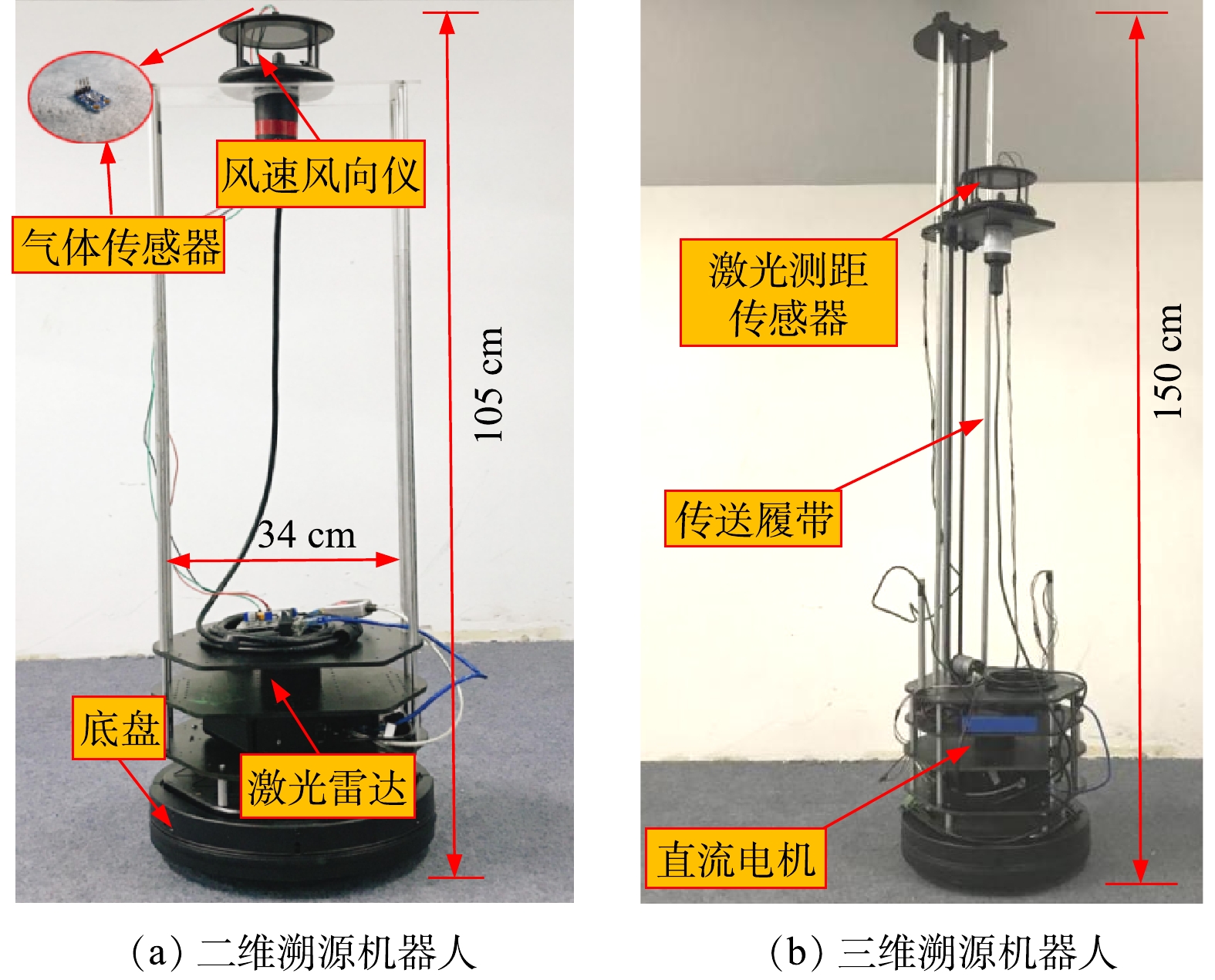
本研究基于课题组之前开发的多机器人二维溯源系统新开发了1套多机器人三维溯源系统,该系统机器人上的传感器可在0.5~1.5 m内受控移动。每台二维溯源机器人(图3(a))均配备1种用于搭载和移动的机器人底盘(Kobuki Turtlebot2),用于定位和导航机器人的激光测距雷达(RPlidarA2),用于监测和收集气流速度与方向的超声波风速风向仪(Windsonic, Gill,传感器精度:风速(12±0.24) m·s−1,风向±3 °),以及用于监测和收集乙醇蒸汽浓度的气体传感器MICS-5524((267±8) mg·m−3,响应时间小于2 s)。
三维溯源机器人(图3(b))的基础配置跟二维溯源机器人类似,包括机器人底盘,激光测距雷达,超声波风速风向仪和气体传感器。三维机器人与二维机器人的显著区别是设计了可以使传感器在高度上受控移动的三维运载模组。三维运载模组用于控制风速风向仪与气体传感器在垂直高度方向上的移动。三维运载模组的运行逻辑为:首先启动并初始化机器人,待气体传感器将收集到的浓度信息传送给工控机,工控机根据相应的运行策略计算出下一步传感器要到达的目标高度;然后根据此刻激光测距传感器测得的传感器的高度来计算出需要上下移动的距离;最后换算出直流电机需要的转向和圈数,如此迭代更新,不断控制传感器在不同高度上的移动。
-
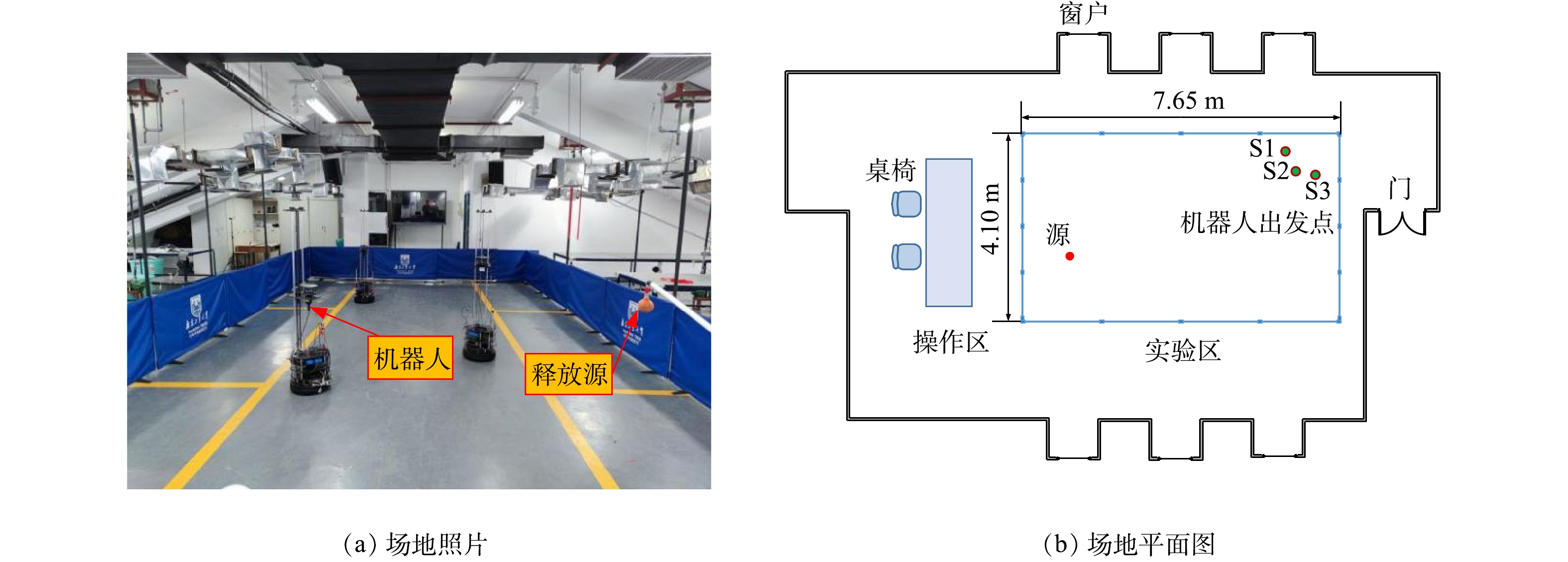
本研究的溯源实验在城市建设学院生产实训基地(图4(a))开展,其中机器人活动范围限定为7.65 m×4.1 m(图4(b))。在本研究中,由于乙醇无毒、易挥发、易获取、价格低廉等特性被选来作为示踪气体。在实验过程中使用水浴箱(保持65 °C恒温)加热含有乙醇液体的烧瓶,生成的乙醇蒸汽通过与气泵相连的橡胶管输送到源位置。实验过程中乙醇以12.5 mg·s−1的速率恒定释放。
-
在每次源定位实验前,将门窗打开进行通风,直至室内乙醇浓度低于10.3 mg·m−3,以保证每次实验开始前的情况基本一致。在实验过程中,室内通风设备全部关闭,门窗也均呈关闭状态,以营造1个无主导气流的室内弱气流环境。在实验开始时,3个机器人分别从起始位置S1、S2、S3出发(图4(b)),机器人采用“走-停-走”的行进策略,即机器人每向前走1步,均需要停留一段时间,以便收集浓度信息,机器人每移动1步均会共享各自的位置信息和浓度信息,然后根据共享的信息代入各阶段的算法计算出各机器人下一步所需抵达的位置。在烟羽发现阶段,各机器人以烟羽发现算法更新自己的位置,一旦某个机器人测得的烟羽浓度超过所设的烟羽发现的阈值,各机器人则进入烟羽追踪阶段,在该阶段,3台机器人的位置信息和浓度信息每行进一步都会带入式(1)~式(4)来计算更新局部最优位置和全局最优位置,以此来规划机器人的路径。
三维溯源与二维溯源不同的是,机器人每次停留,其三维运载模组均在高度上移动一段距离(0~0.08 m),以采集不同高度上的浓度信息,其中在烟羽发现阶段固定移动0.08 m,在烟羽追踪和源确认阶段,每一步将根据3台机器人所处位置的高度和浓度通过标准粒子群算法计算出下一步在高度上移动的最优距离。在机器人溯源过程中,如果浓度最大值在5步内保持不变,则视为自己被困在了局部浓度极值区域,此时转为源确认算法。当实验结束时,如果定位误差小于或等于0.5 m,则视为实验成功。此外,为控制每次实验的耗时和保障溯源过程的效率,若机器人在50步(二维溯源约为15 min,三维溯源约为20 min)内无法找到源位置,则溯源实验终止,并宣布实验失败。
2.1. 实验方案设计
2.2. 多机器人溯源系统
2.3. 实验场地及源设置
2.4. 实验流程
-
为了验证三维溯源的有效性,以及在源高度未知的场景中二维溯源是否仍然适用,在室内弱气流环境下,本研究利用SPSO方法进行源定位实验。针对1.05 m和0.75 m 2种源高度,共开展了60组溯源实验,结果如表1所示。由表1可见,对于2种源高度,三维溯源的实验结果差别很小。在源高度为1.05 m和0.75 m时,三维溯源实验分别成功完成了9组和8组,成功率分别为60%和53.3%。上述实验结果验证了三维溯源的有效性,同时表现出三维溯源对不同源高度的较好适应性。此外,以上研究结果也表明,在弱气流环境中三维溯源的成功率仍不是很理想,还有待进一步提高。
对比三维溯源和二维溯源实验结果可以发现,当源高度为1.05 m时,即源高度与二维溯源传感器高度相同时,二维溯源不仅成功率(80%)明显高于三维溯源的成功率(60%),而且平均定位步数(16步)和平均定位时长(318 s)也明显低于三维溯源的平均定位步数(30步)和平均定位时长(762 s)。当源高度为0.75 m时,即源高度与二维溯源传感器高度不同时,从成功率和平均定位步数以及平均定位时间来看,三维溯源性能仅略有降低,但二维溯源的性能却显著下降,尤其是成功率已从80%陡降至26.7%,虽然此工况下二维溯源平均定位时长要低于三维溯源,但如此低的成功率已经不能满足实际应用需求。上述对比进一步说明,对于源高度未知的场景,三维溯源具有较高的适应性,而二维溯源却不具备类似的适应性。
由表2可见,二维溯源和三维溯源的失败实验多是由于定位误差超过了0.5 m,主要因为室内弱气流环境缺少主导气流且受湍流主控,实验区域内很容易形成多个浓度局部极值区域,导致机器人难以跳出,以至于最后在远离源的位置宣告了源的存在。对于源高度为0.75 m的二维溯源失败实验多是因为机器人传感器高度为1.05 m固定不变,以至于难以在这一高度上持续追踪从源处释放的酒精蒸汽的烟羽。
-
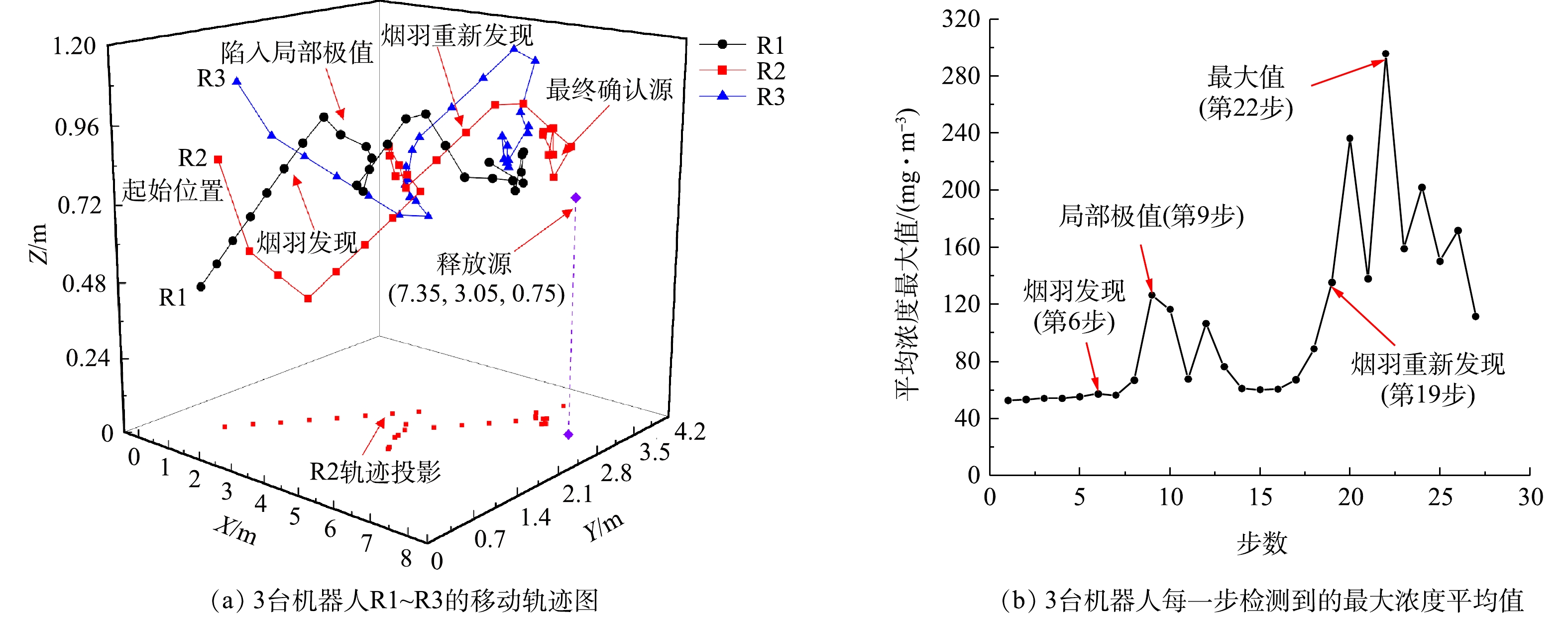
1)在源高度0.75 m时成功的三维溯源实验。图5展示了1组利用3台三维溯源机器人在实训中心三楼实验区域中,使用SPSO方法进行三维溯源并成功定位恒定源的实验过程以及机器人每1步检测到的最大浓度平均值。在实验过程中,从起始点出发到最终定位目标源,机器人主要经历了烟羽发现、烟羽追踪、第1次陷入并逃离局部极值区域、烟羽重发现以及源确认阶段,共用了27步。
实验开始前,3台机器人首先进行初始化,机器人移动到预先设置的出发位置。实验开始后,机器人从起始位置采用发现搜索策略出发,烟羽是由R1在第6步发现的,此时R1的信息采集模块高度为0.76 m。在此组实验过程中,R1第6步发现烟羽后,整个机器人群便切换到烟羽追踪阶段,开始执行SPSO算法。开始烟羽追踪后,第9步时,R1在0.81 m高度检测到1个较大的浓度平均值,接着R1开始在附近继续移动搜索以找到更高的浓度值,R2和R3则开始不断向R1靠近。在接下来的5步中,3台机器人均未检测到更高的浓度均值,表明此时机器人已经陷入了局部浓度极值区,并采用浓度极大值方法进行源确认。但R1在第9步检测到的较高浓度平均值小于之前设定的源确认浓度阈值Cmax,根据浓度极大值方法,机器人判定找到了1个局部浓度极值区。为了更好地逃离局部浓度极值区并再次搜索到更高的浓度,机器人再次采用发散搜索策略去移动探索。在第19步时,R2检测到了1个更高的浓度值,3台机器人再次进入烟羽追踪阶段。在第21步时,R2检测到1个较高的浓度平均值,并已经到达了源位置附近。然后R2对其周边领域进行搜索,试图找到1个更高的浓度均值,R1和R3则不断向R2靠近,直到第27步时,机器人群均未找到1个更高的浓度均值。机器人立即开始采用浓度极大值方法进行源确认,判断出第22步测得的浓度大于设定的Cmax,故判定机器人已经成功定位到了释放源,终止源定位过程。此时,机器人确定的源位置(全局最优位置)与真实源位置之间的距离为0.32 m(小于0.5 m),表明这组源定位实验成功完成。
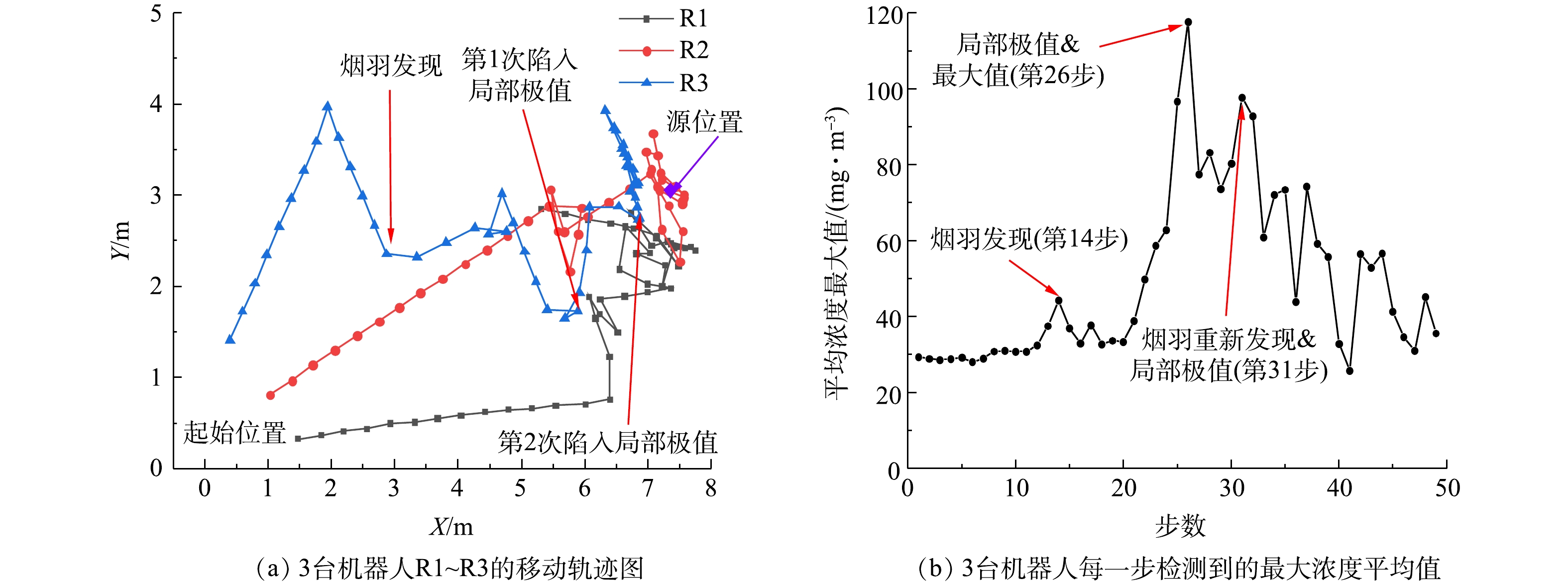
2)在源高度0.75 m时失败的二维溯源实验。在源释放高度为0.75 m时,机器人从预先设定的起始位置按固定角度出发,按直线发散搜索策略前进。第14步时,R3发现烟羽,随后进入烟羽追踪阶段;第26步时,机器人群找到了1个局部浓度极值区,并根据浓度极大值方法判定机器人已经陷入该区域,随后采用发散搜索策略跳出,进入烟羽再发现阶段;第31步时,机器人重新检测到1个较高的浓度均值,开始进行烟羽追踪,但在接下来直到源定位过程结束均未找到更高的浓度值,又因第31步的浓度值未到达源确认的阈值,故判定此组源定位实验失败(图6)。
进一步分析这组失败的实验案例可以发现,在二维溯源机器人上的传感器高度低于源释放高度时,即使机器人与源的距离会很近甚至是小于0.5 m,但在该位置不能检测到更高的浓度均值来取代已测得的较高的浓度均值,从而导致机器人接下来朝远离源的方向行进,最后终止了源定位过程。这说明,室内弱气流环境下风速风向无规律变化会使源附近的流场和气体浓度出现较大的波动,让机器人有时检测不到较高的浓度均值。此外,由于乙醇蒸汽的密度较大而发生下沉,可能使机器人在高于源释放高度上难以持续追踪其烟羽,从而导致源定位失败。
3.1. 实验结果分析
3.2. 源定位过程分析
-
1)在源高度为1.05 m和0.75 m时各开展了15组三维溯源实验。结果表明,SPSO方法能够适用于室内弱气流环境下的三维溯源,并且对不同的源高度具有良好的适应性,故其能够应用于源高度未知的场景;此外,在室内弱气流环境中三维溯源的成功率还有待提高。
2)当三维溯源的源高度(1.05 m)与二维溯源的传感器高度相同时,二维溯源的性能明显优于三维溯源;但当源高度(0.75 m)与二维溯源传感器高度不同时,二维溯源的成功率(26.7%)已不能满足现实需求,说明二维溯源并不能适应不同的源高度,因而也难以将其应用于源高度未知的场景中。
3)当源高度(0.75 m)低于二维溯源的传感器高度时,三维和二维溯源的源定位过程显示,三维溯源通过主动调节传感器高度更易于检测到乙醇蒸汽,而二维溯源则因为传感器的高度固定而难以检测到乙醇蒸汽,这也说明在室内弱气流环境中三维溯源比二维溯源更能够适应源高度未知的场景。
