

 下载:
下载:














-
随着许多国家和地区对石油需求和运输的加大,石油泄漏导致的污染不仅破坏生态环境,而且带来严重的经济损失并危及人类和海洋生物的健康。2010年4月,发生的震惊世界的墨西哥湾深水地平线平台爆炸事故,导致至少490万桶原油泄漏,给墨西哥湾沿海社区当地居民带来了严重的健康伤害[1-2];2010年7月16日,位于辽宁省大连新港附近的大连中石油国际储运有限公司原油罐区输油管道发生爆炸,大量原油泄漏并引发大火,对海洋生态环境造成严重破坏[3];2011年6月11日,中国海洋石油总公司在渤海湾蓬莱19-3油田发生的溢油事故导致大约84×104 m2沿海水污染,给河北省和辽宁省水产养殖业和旅游业造成巨大的经济损失[4]。将溢油清除技术应用于海面油污清理的研究也逐渐获得许多国内外研究人员以及海洋环境有关部门的关注。
国内溢油清除技术主要集中在溢油材料和方法的研究[5-6],并未结合机器人和人工智能技术进行研究,国内溢油回收船都未完全实现自动化,需要人工参与协助完成[7]。LAFFON等[8]发现参与溢油清理工作的人员面临健康风险;KWOK等[9]发现参与墨西哥湾石油泄漏事故清理的人员犯有抑郁症的报告有所增加。近年来,国外用机器人或者无人船对溢油检测和回收的研究开始增多。KATO等[10]研究机器人用于在石油泄漏和海底天然气泄漏后跟踪和监测;WANG等[11]利用撇浮器放置在无人船的前甲板上,但灵活性差,溢油回收能力有限;MAAWALI等[12]利用无人船检测溢油并从污染区域采集样本,但其未设计高效的吸油材料和设备,并不能解决水面大量溢油的回收工程问题。
针对现有溢油清除技术上的缺陷,本研究以基于泡沫金属基浮油收集材料的水面溢油自动清除水面机器人全面代替人工作业,该溢油自动清除水面机器人是在智能水面机器人平台上搭载油污处理系统,采用超疏水亲油材料对水面油污进行水油分离,为智能水面机器人平台通过结合自主巡航、溢油检测和图像识别功能,为水面溢油进行自动识别和自动回收提供依据。
全文HTML
-
由于多孔疏水亲油材料表现出优异的油水分离性能,使其在处理水面浮油领域受到广泛的关注[13-15]。然而,目前使用的多孔疏水亲油材料大多使用有机聚合物作为基质材料,存在局限性。俞书宏等[16]使用聚酯海绵、三聚氰胺海绵等多多孔材料作为基质,在多孔材料的内部插入与泵连接的管子形成浮油收集设备;但由于多孔材料或者海绵材料的机械性能较差,难以适用于水面机器人动态浮油收集过程。因此,本研究设计制备了一种泡沫金属基浮油收集材料,因其具有较高的机械强度,可适用于水面机器人的动态收集浮油过程。
-
实验材料:泡沫金属(包括泡沫铜、泡沫铝、泡沫镍、泡沫铁及其合金材料),亲油疏水材料(包括全氟癸烷硫醇、聚丙烯酸酯、聚氨酯、聚二甲基硅烷、有机硅及聚四氟乙烯),乙醇,稀硝酸,氢氧化钠,丙酮,所用试剂均为分析纯。
实验仪器:KO-500DE超声波清洗机;DHG-9035A干燥箱;RET BASVCC磁力搅拌器。
-
将泡沫金属加入质量分数为1%~99%的乙醇水溶液进行超声清洗,再加入到质量分数为0.1%~10%的稀硝酸溶液中,腐蚀清洗0.5~50 h;处理后的泡沫金属基加入到NaOH溶液中,羟基化处理1~60 min,其中NaOH质量分数为0.01%~5%,羟基化温度为50~120 ℃;同时将亲油疏水材料完全溶解于有机溶剂乙醇或者丙酮中;表面羟基化的泡沫金属基加入到完全溶解的亲油疏水溶液中,持续搅拌0.5~50 h。最后,将搅拌后的混合物进行烘干处理,即得到浮油收集材料(图1),并对其进行了一系列的性能表征。
-
根据上述合成过程,制备泡沫铜基浮油收集材料。首先将泡沫铜加入质量分数为1%乙醇水溶液中,超声清洗50 h,再放入质量分数为0.1%的稀硝酸溶液中,腐蚀清洗60 min,将清洗后的材料加入到1% NaOH溶液中,并在100 ℃下进行表面羟基化处理10 min,将亲油疏水材料,即全氟癸烷硫醇完全溶解于有机溶剂乙醇中,将处理后的泡沫铜加入亲油疏水材料中,持续搅拌0.5 h,最后将所得混合物烘干,即得浮油收集材料。
-
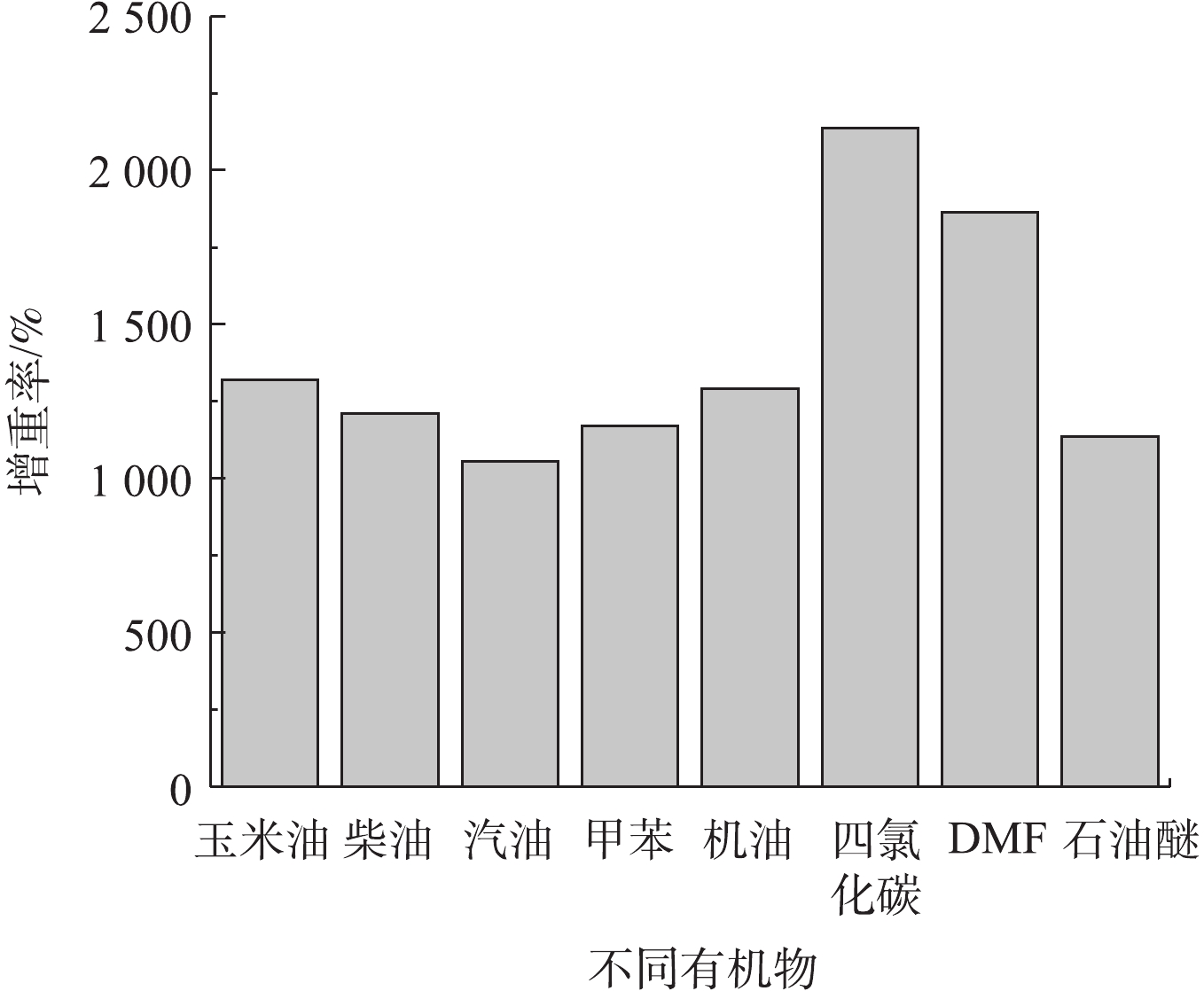
实验中首先对乙醇溶液进行了超声清洗,然后再进行腐蚀清洗,从而将泡沫金属表面附着的污染物清除掉;并进一步通过稀硝酸将其表面的氧化层进行清除,提高了泡沫金属的清洁度;最后对其进行表面羟基化处理,增加了泡沫金属表面的羟基基团,从而为下一步表面修饰亲油疏水涂层提供丰富的羟基基团,提高泡沫金属和亲油疏水材料之间的结合力。用上述所制得的泡沫金属材料对不同有机物做吸附测试,测试结果如图2所示。可以看出,制得的泡沫金属材料对玉米油、柴油、汽油、甲苯、机油、四氯化碳、DMF、石油醚等有机物吸附后重量都有明显的增加,说明用此材料对有机物进行吸附具有可靠性高、吸附效果好的优势。此外,制得的泡沫金属材料(浮油收集材料)孔隙度可达到90%以上,是具有一定强度和刚性的多孔金属。与一般烧结多孔金属相比,泡沫金属的气孔率更高,孔径尺寸较大,一般可达7 mm。泡沫金属力学性能也随气孔率的增加而降低,其导电性、导热性相应呈指数关系降低。当泡沫金属承受一定的压力时,由于其气孔塌陷导致受力面积增加和材料应变硬化能力增强,使泡沫金属具有优异的冲击能量吸收特性。
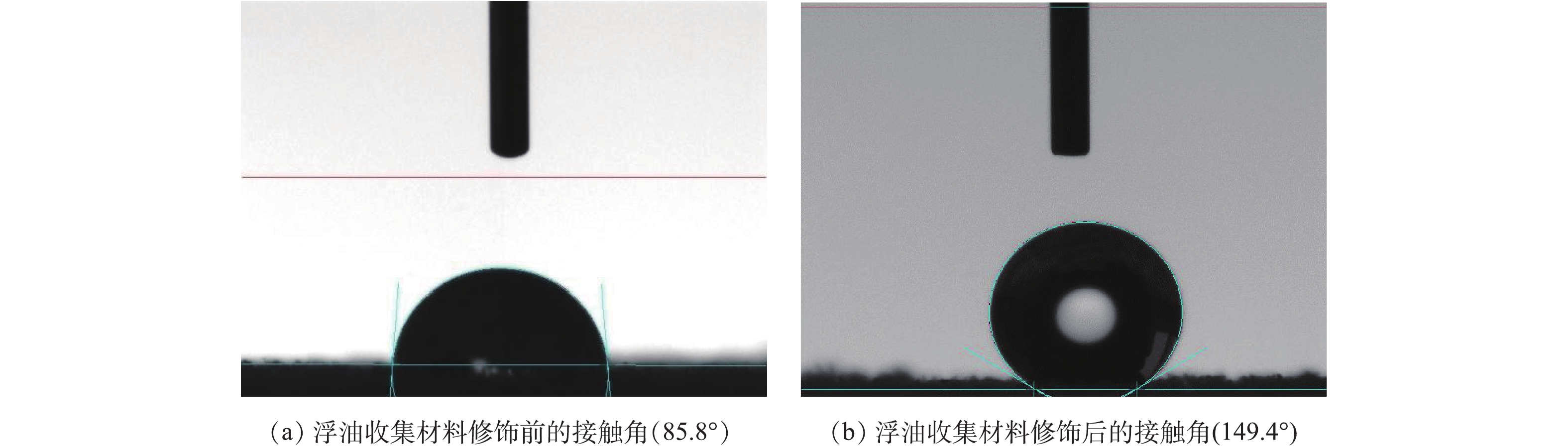
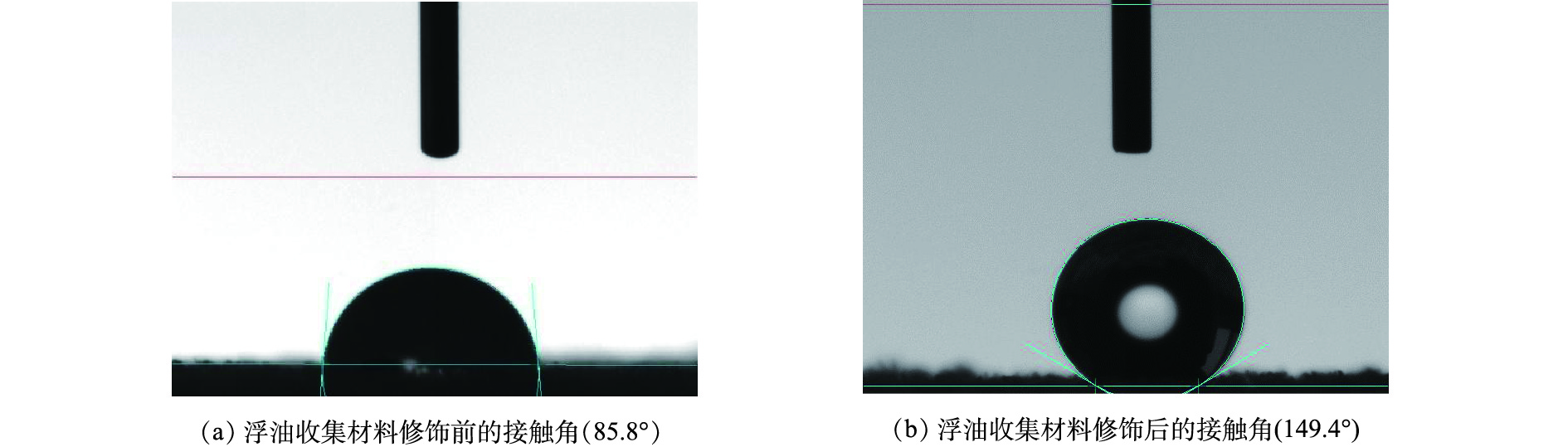
实验制备的泡沫铜浮油收集材料的亲油效果如图3所示,其疏水效果如图4所示,浮油收集材料修饰前后接触角测量对比如图5所示。对于以上泡沫金属基浮油收集材料,提高的浮油吸附能力及增强的机械性能都使材料本身更适于动态的浮油收集过程,尤其适合应用于船载处理水面浮油装置-水面机器人,用来清理江、河、湖、海水面的浮油,改善大部分的被浮油污染的水面环境。
1.1. 实验材料及仪器
1.2. 合成过程
1.3. 泡沫铜基浮油收集材料制备
1.4. 实验及结果讨论
-
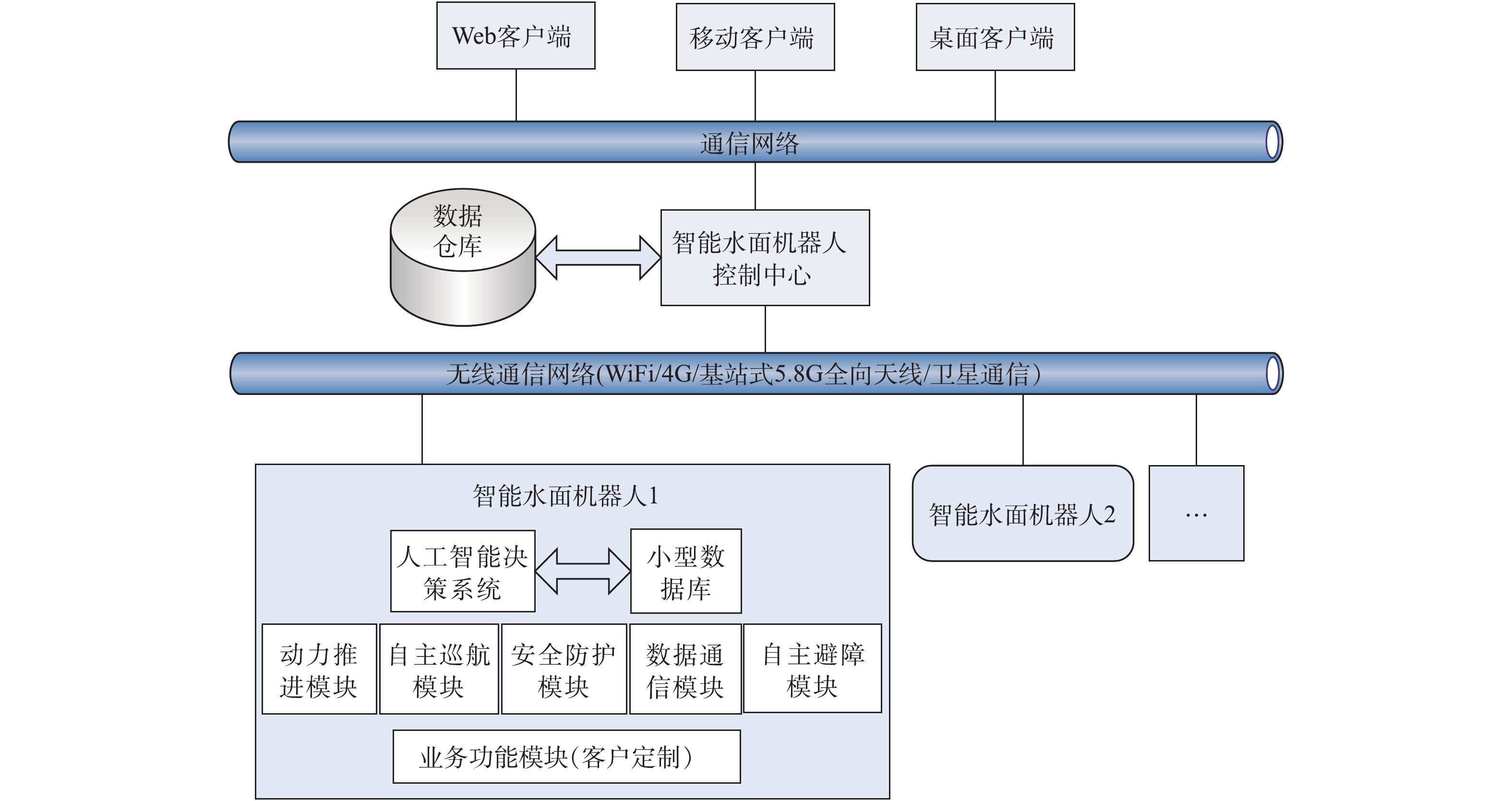
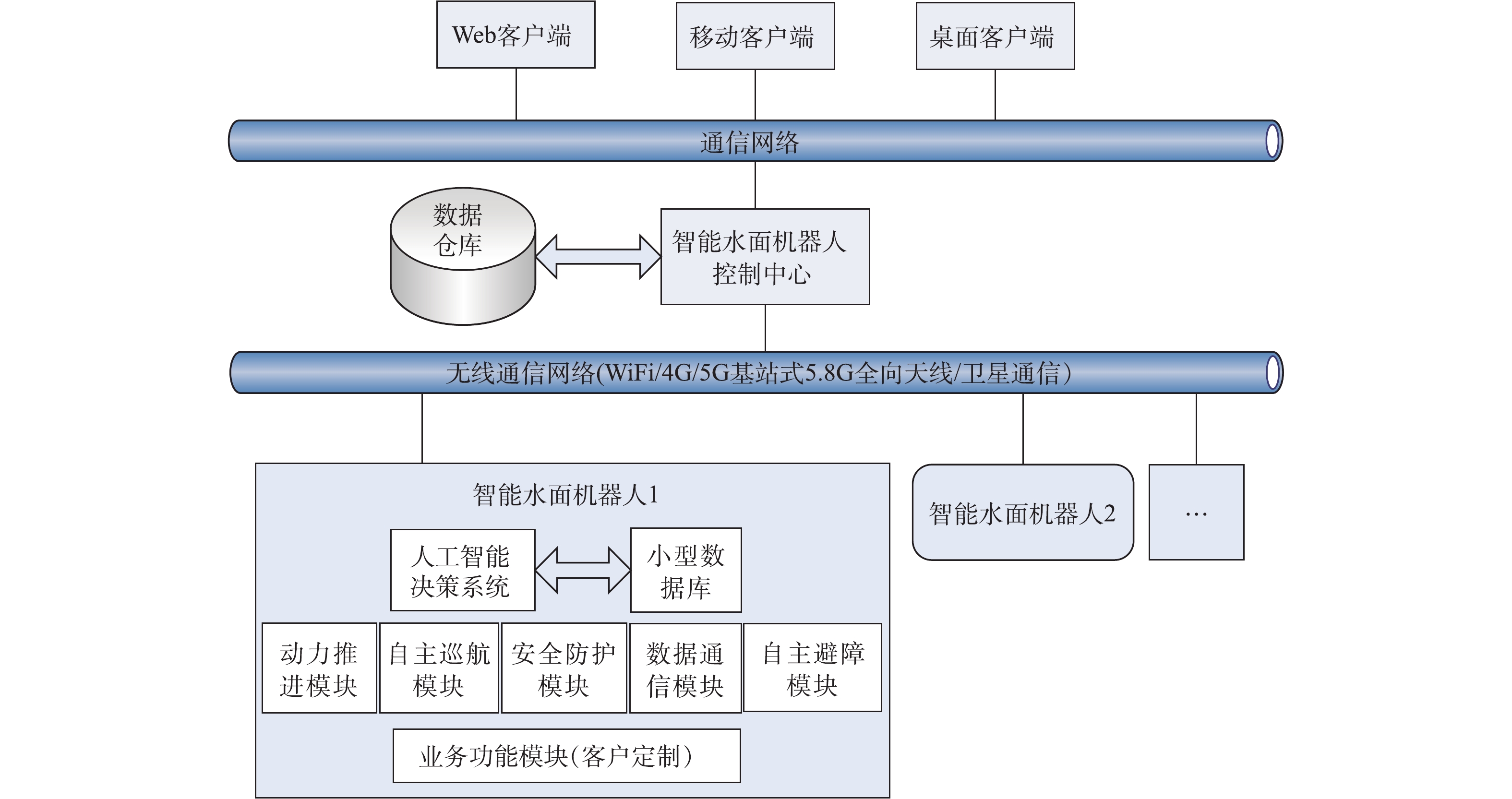
智能水面机器人平台是利用无线通讯技术、互联网技术、人工智能技术、信息化技术等开发的一款实现无人船远程控制和自主运行的通用平台。系统包括智能水面机器人服务器、智能水面机器人终端、客户终端3个部分。系统构成如图6所示。智能水面机器人系统平台功能如下。
1)自动避障:能识别岸边、桥墩、船舶等障碍物,并主动避让。
2)自主导航:用户指定目的地,智能水面机器人可自动规划行驶路径。
3)多点远程控制:通过web端、移动客户端监控多个水面机器人的运行。
4)视频监控:智能水面机器人搭载了网络高清摄像机,用户可远程监控水面动态。
5)图像识别:对水面油污进行识别和跟踪,自动进行油污收集,与溢油检测器配合使用。
6)自主巡逻:用户可通过智能水面机器人管理平台,给水面机器人规划路径,发布巡航任务,智能水面机器人可周期性地自主巡航。
7)返港:信号丢失以及设备故障情况下水面机器人自动返回母港。
水面机器人GPS导航定位通过北斗卫星进行通讯。图像传输和巡航控制通讯模块采用自建基站通信或者使用4G/5G的GPRS模块通信。对于内河或者近海岸可以采用4G/5G通信,短距离通讯也可以采用WiFi通信。对于远海则采用近海卫星宽带或自建基站服务的方式通讯,基站中心可以搭载在安全性较高的主船上,主船跟随机器人在远海提供通信服务基站中心,通过船载基站通讯模块与主船上的基站监控单元建立无线通讯链接,工作人员在主船上的控制中心对溢油清除水面机器人进行巡航控制和查看实时视频图像。
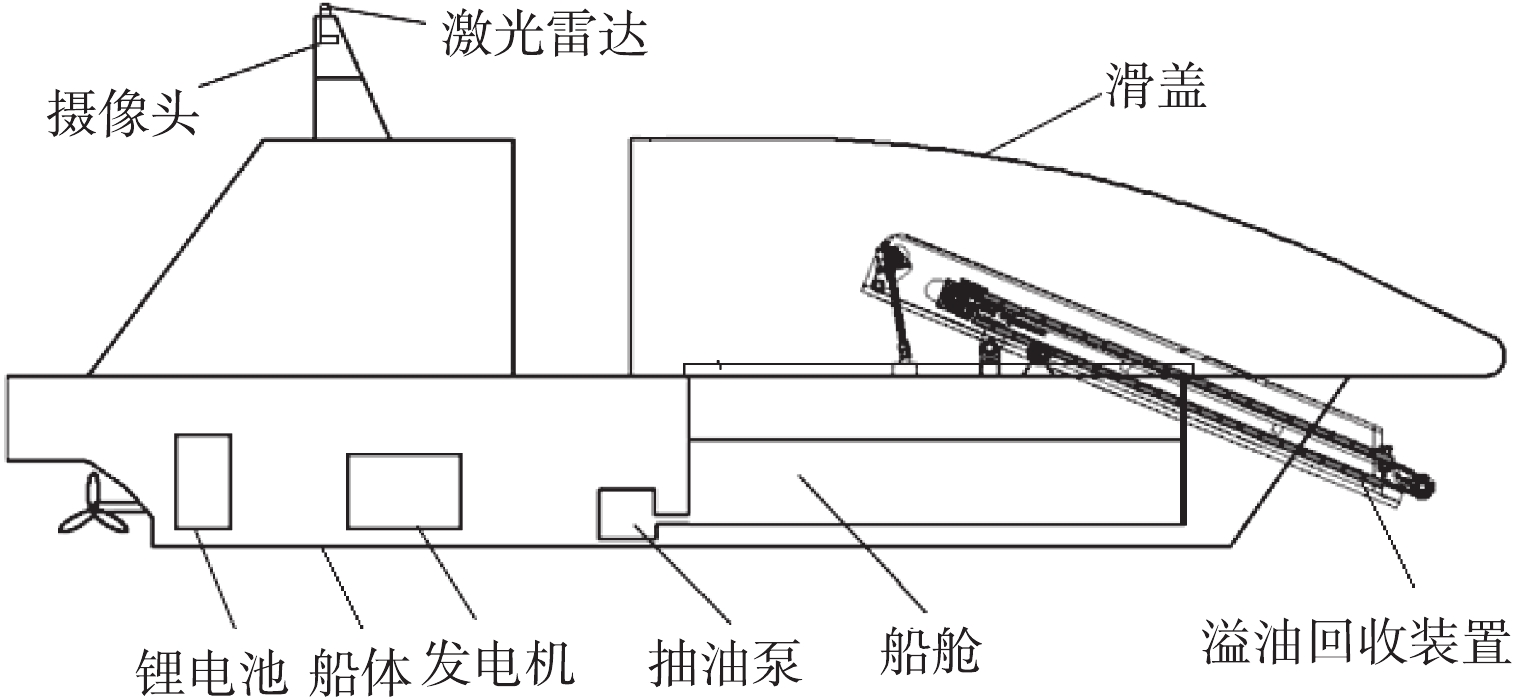
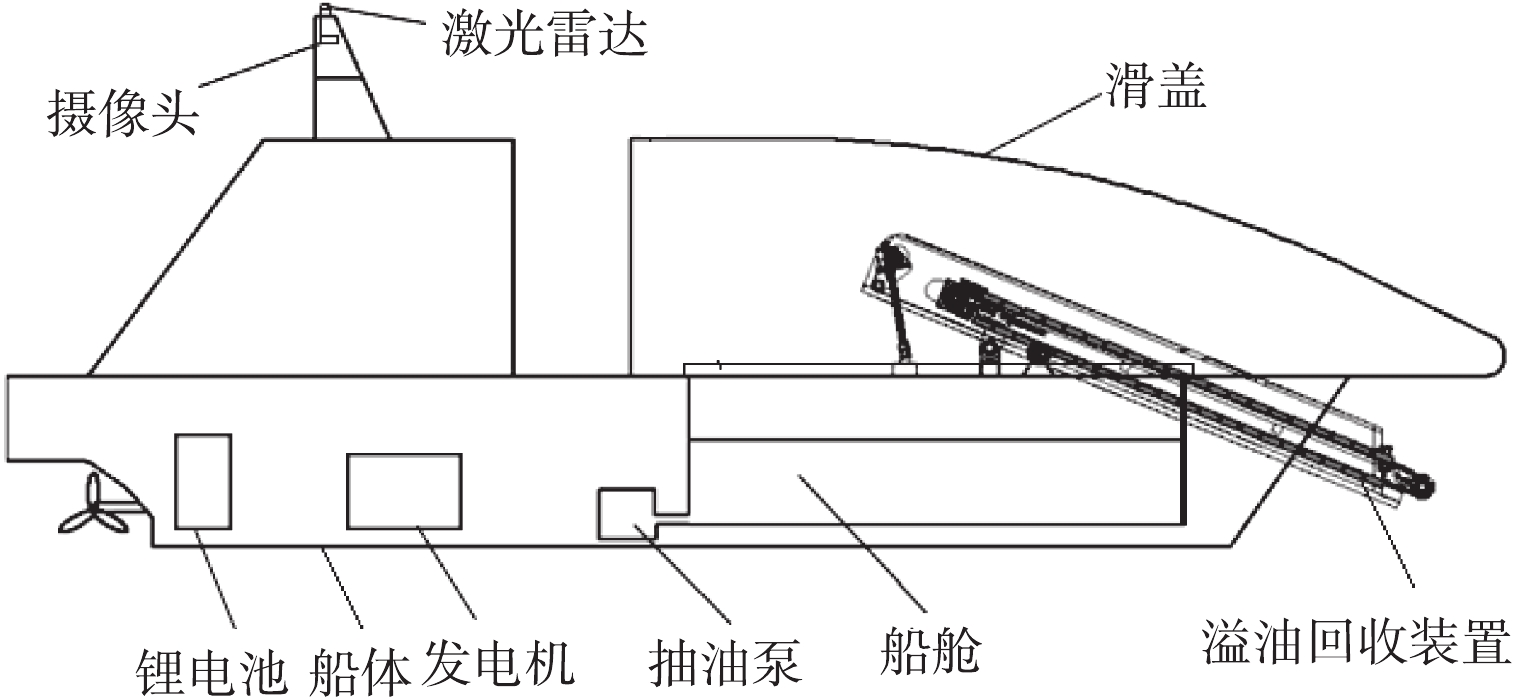
水面机器人采用双体船结构,长6 m,宽2.6 m,抗风浪等级3级左右。船体内置发电机和锂电池提供混合动力,锂电池的输出端通过多路开关电源与电动船的驱动电机连接进行供电,用于驱动电动船行驶,电动船的内部设有自主巡航控制系统。电动船的船头设有检测装置,检测装置包括用于避开障碍物的激光雷达和用于对水面溢油进行检测的溢油检测器,激光雷达、溢油检测器的输出端均与电动船上的中央控制器连接,另外中央控制器还分别与驱动电机、溢油回收装置连接。溢油自动清除水面机器人结构如图7所示,研制的水面机器人实物如图8所示。
自主巡航控制系统包括固设于电动船上端的传输天线,传输天线包括GPS传输天线和GPRS传输天线, GPS传输天线的输出端通过GPS卫星定位传感器与电动船上的中央控制器连接;GPRS传输天线的输出端通过GPRS无线数传模块与中央控制器连接;中央控制器的输入端与电子罗盘连接,用于对电动船的行驶方向进行识别。GPS传输天线将卫星信号通过GPS卫星定位传感器传输给中央控制器,确定当前电动船的位置坐标;同时,GPRS传输天线接收人工远程控制指令,并将控制指令通过GPRS无线数传模块传输给中央控制器,确定其航行的目的地;再通过电子罗盘确定电动船的当前方向,传输给中央控制器。中央控制器分别获取GPS经纬度坐标信号、控制指令信号和电子罗盘指示的电动船当前行驶方向信号,通过处理运算,即可根据预先巡航规划设定的路线,实时驱动电动船,进行自主巡航并到达溢油回收目的地。
激光雷达是以激光为工作光束的雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统,它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送给中央控制器,来驱动船体避开障碍物。
溢油检测主要是通过溢油检测器与图像识别相结合,保证溢油检测可靠性。溢油检测器是利用油膜和水面对光的反射率不同,判断是否有油膜存在,将其悬吊于机器人上方,通过激光反射技术实现非接触、连续监测;而图像识别是利用红外摄像头,通过对油膜与水面图像的不同纹理特征和形态特征进行分析检测。溢油检测时,检测器激光光源照射至水面,并将其反射后的光信号转换成电信号,传输给机器人中央控制器,中央控制器对此信号进行分析,并与图像识别结果相结合,判断出水面是否有溢油,从而控制溢油回收装置进行溢油回收处理。
-
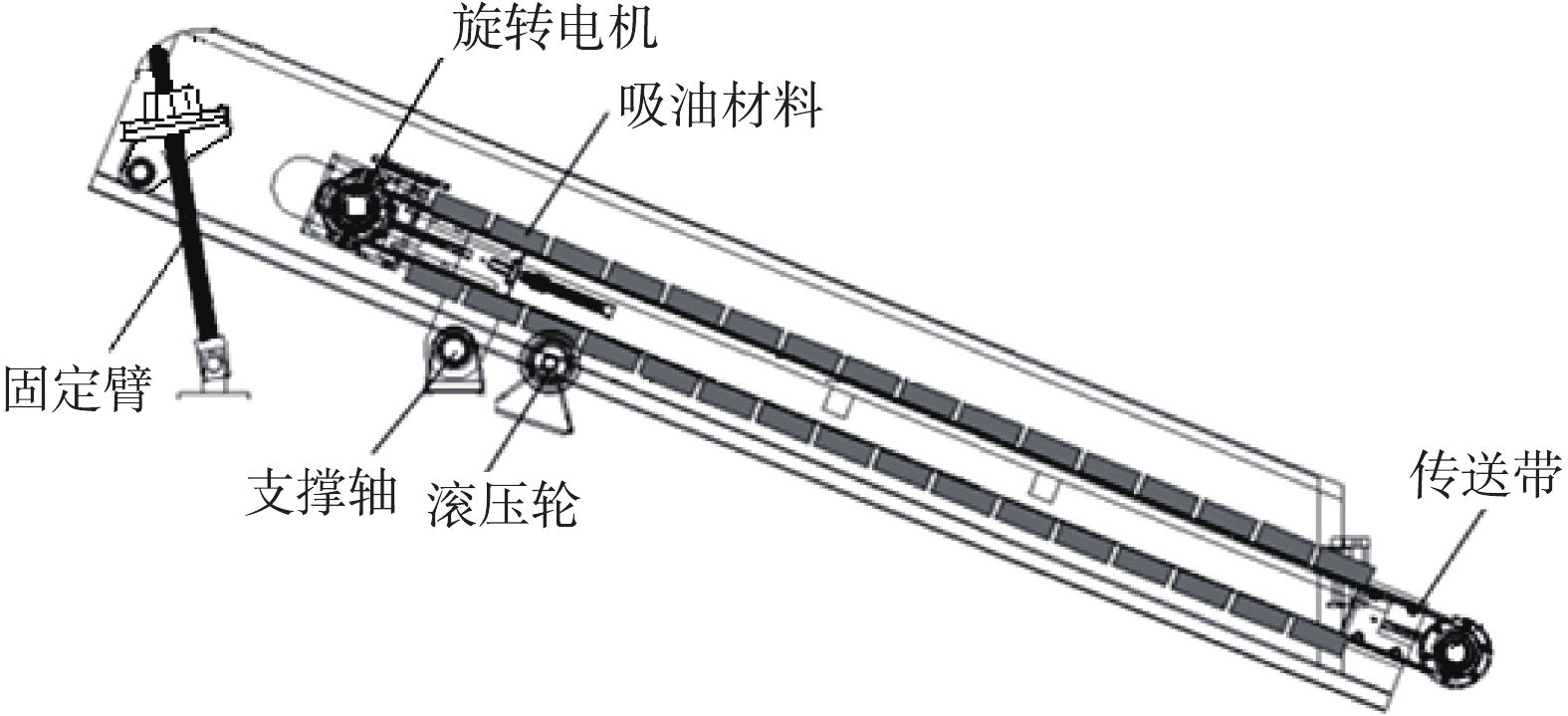
溢油回收装置结构如图9所示。溢油回收装置固定安装在机器人的前端。溢油回收装置包括旋转电机、支撑轴、固定臂、环形传送带、滚压轮等。溢油回收装置通过支撑轴和固定臂固定在船体上,旋转电机驱使传送带转动,传送带的外表面铺设一层吸油材料,吸油材料通过高强度尼龙绳固定在传送带上,滚压轮固定在传送带下方的船体上。
溢油回收装置正在进行作业的过程如图10所示。机器人启动溢油回收装置进行溢油清理时,吸油材料随着传送带开始转动并与水面溢油接触,溢油被吸油材料层吸附,在传输过程中,吸满油的吸油材料运动到下方的滚压轮处,与滚压轮接触而产生挤压,溢油被挤出并通过过滤网过滤后落入船舱内的油桶。挤完后的吸油材料层会随着传送带继续转动、继续吸取水面溢油,如此循环往复,这样就实现了对水面溢油的回收。
2.1. 智能水面机器人平台设计
2.2. 溢油回收装置设计
-
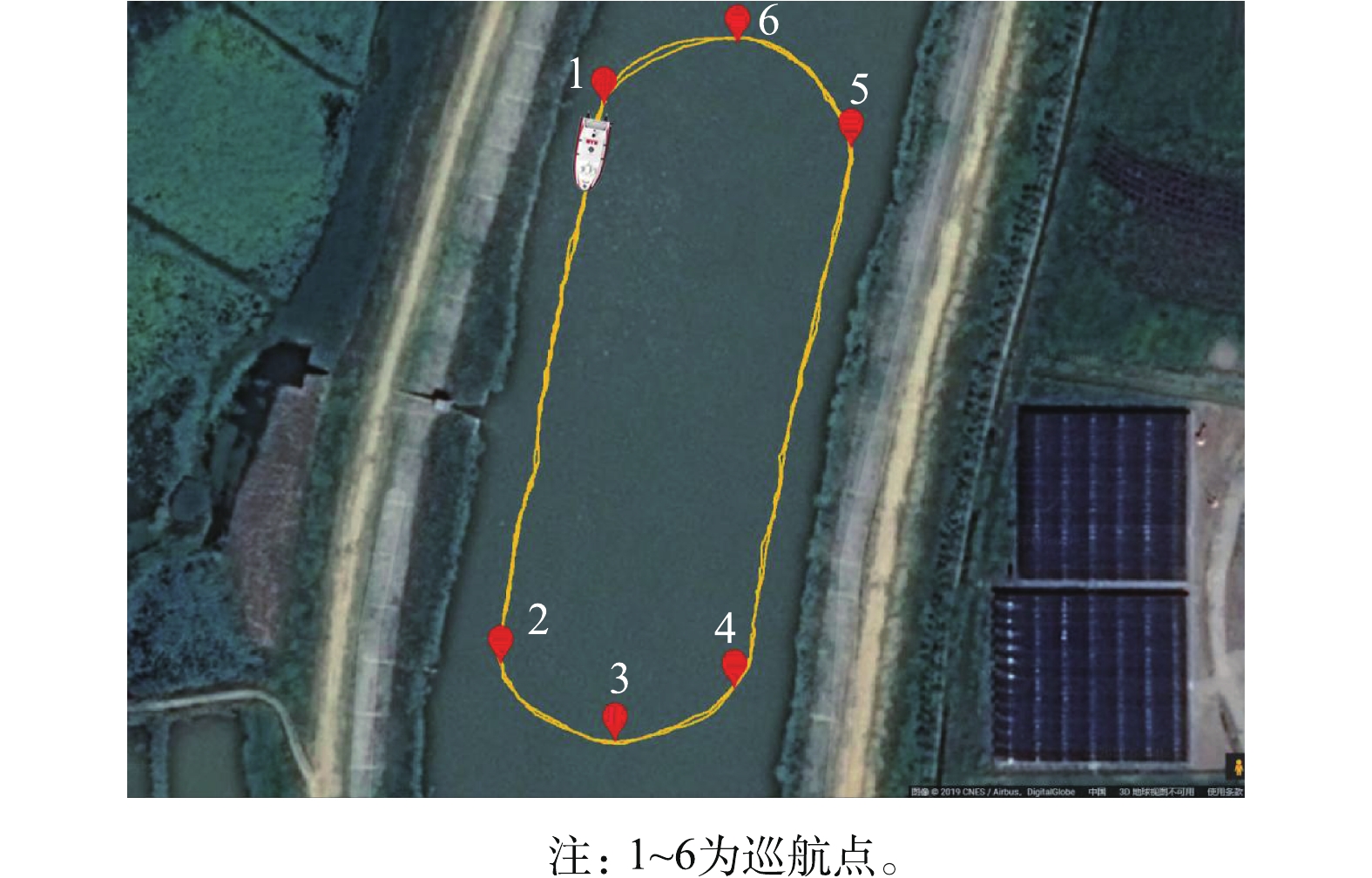
溢油清除水面机器人系统具备了自主持续性吸油、自主巡航、自动识别油污等功能,实现了水面油污清除的智能化、自动化。使用水面机器人对已发生石油泄漏的河道、模拟海洋石油泄露溢油清除测试,并且在测试过程中利用快速经过的快艇所带来的波浪模拟海浪。受风力和波浪的影响,溢油一般都集中在河道两侧,在被污染的水面区域内,沿河道两侧设置6个巡航点,按照顺序进行周期性巡航,如图11所示。水面机器人会根据所设巡航点自动建立路径规划,根据拟合的曲线巡航路径进行巡航。图11为水面机器人2次巡航后的实际GPS轨迹,可以看出,受风力和波浪的影响,航行轨迹有点弯曲,但是机器人基本按照规划路径巡航,偏差可以忽略不计。
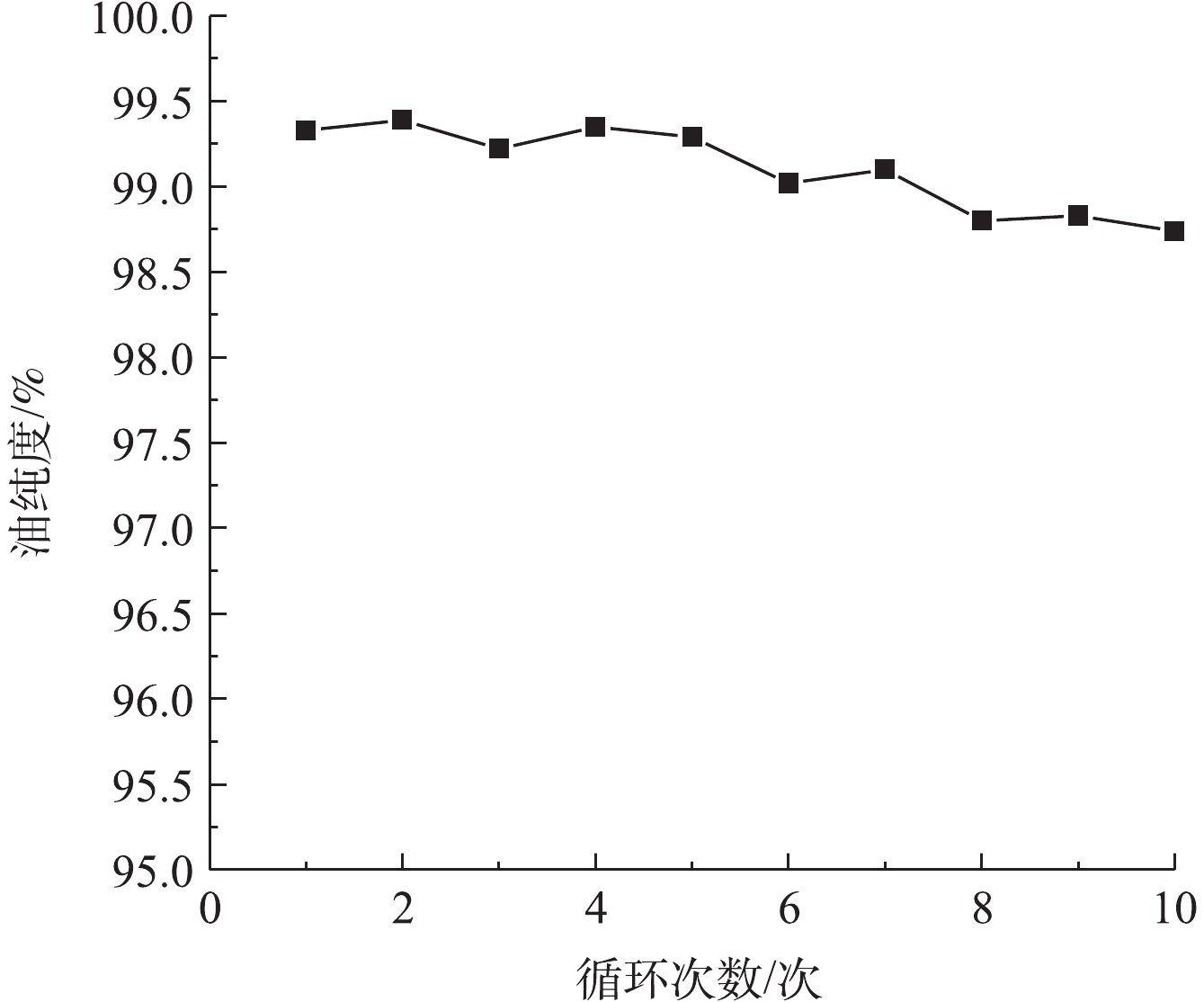
在工程运行过程中,对泡沫金属基浮油收集材料进行过滤清洗后重复使用,设置水面机器人自动巡航的同时进行油污自动清除作业,设置定点巡航,重复10次,通过测定每次过滤液的油纯度,可以得到油纯度随循环使用次数的变化关系,如图12所示。由图12可知,在高达10次的循环测试后,滤液中油的纯度始终保持在98.65%以上,可以证明泡沫金属基浮油收集材料能够循环利用。
对于巡航不到或者不在巡航范围内的溢油,也可以通过后台软件,手动控制机器人,航行到溢油所在水面进行清理。工程运行最终的结果表明,机器人溢油回收系统吸油效果良好,效率高。水面溢油清除前后对比效果如图13所示,可以看出,水面油污清理过后,水面环境得到有效改善,水面倒影清晰可见。
-
1)通过对泡沫金属材料进行亲油疏水的表面修饰,制备了泡沫金属基浮油收集材料,该材料提高了浮油收集材料的机械性能,同时也提高了对浮油的吸附能力,并且可以循环利用。浮油收集材料适应于动态的浮油收集过程,能够用于处理石油泄漏、有机溶剂泄漏,也可以用于清理江、河、湖、海水面的浮油,特别适应于船载处理水面装置-水面机器人。
2)设计并制作了自动溢油回收装置,实现了油水的有效分离,水面溢油得到有效回收,解决了工程中水面溢油清理和回收难的问题。
3)结合自主水面机器人平台,采用超疏水亲油材料即泡沫金属基浮油收集材料作为吸油材料,研制溢油清除水面机器人系统。该系统具有自主持续性吸油、自主巡航、自动避障等功能。
4)通过自主规划路线对溢油进行在线检测和自动识别,实现对任意水域上的溢油在无人操作情况下的自动回收、无线数据传输与远程监管,保证了工作人员的人身安全,也减少了人员的投入,降低了人工成本。实现了海面油污清除的智能化、自动化,具有较好的发展前景和应用前景。
