


 下载:
下载:
-
利用人工湿地进行污水处理的技术目前已经得到广泛应用,但人工湿地运行过程中频繁出现的堵塞问题,已严重影响到人工湿地的持久和高效运行。而目前对人工湿地发生堵塞的判断及堵塞程度仅能进行定性评价,无法对堵塞区域进行精确定位。因此,在治理堵塞的时候没有具体针对性,在治理的时候只能针对于人工湿地整体进行,时间成本高、经济效果差。因此,针对人工湿地堵塞区域的定位探测是亟待解决的问题。
目前在实际针对人工湿地堵塞问题上,较为常用的有生物电池法[1]、探地雷达法[2-5] 、电阻率法[6-8]、渗透系数法[9]、示踪剂法[10-11]、分析堵塞物质性质[12]等方法。对于示踪剂法,投入的示踪剂会被湿地植物和其他生物吸收[13-14],且单一的示踪实验结果可能不具有代表性[4]。通过水力传导率法测得的值仅表示轴流方向上横截面内的平均水力传导率,并不能表示该横截面内某特定垂直和横向位置处的堵塞严重程度[15],实际操作过程中一般将水力传导率法和示踪剂法相结合。AIELLO等[16]分析了水平潜流人工湿地的水力特性,通过现场测量砾石层的水力传导率、量化累积堵塞物质,最后通过示踪实验可视化流动路径来研究堵塞现象。对于利用地球物理方法探测人工湿地堵塞问题方面,目前的文献主要还是集中在电阻率法和探地雷达方法,探地雷达精度较高、速度快,适合中、小尺度监测,可得到湿地内部能量衰减图像[3-4]。特别是MATOS等[5]使用探地雷达探测了种植香蒲与未种植植被的2个全尺寸水平潜流人工湿地的堵塞特性,结果表明,探地雷达可以探测出堵塞区域,但地质雷达方法也存在纵向尺度定位不精确的问题,并且由于人工湿地一般纵向尺度较小和水饱和状态,存在基底和边界反射较强、堵塞区域反射不够清晰的问题,因而探测精度不够理想。电阻率法对湿地内部造成的干扰较小,可以快速、无损、有效地反映湿地堵塞状况,在湿地堵塞物定性定量方面具有良好的发展前景[7-8]。但目前使用的电阻率探测方法多采用的是地面电阻率法,在纵向尺度探测效果不佳,并且干扰因素过多。
基于上述情况,本研究以较为广泛的潜流人工湿地为研究对象,根据潜流人工湿地结构和堵塞区域的特点,基于电阻率法提出了利用改进的高密度电阻率法来探测和定位人工湿地堵塞区域,并使用Visual MODFLOW(VMOD)建立了堵塞模型,主要从人工湿地堵塞探测的电阻率方法讨论、电阻率法的水槽模拟实验和流场模拟几个方面,探讨了基于电阻率法探测和定位人工湿地堵塞区域的可行性。
-
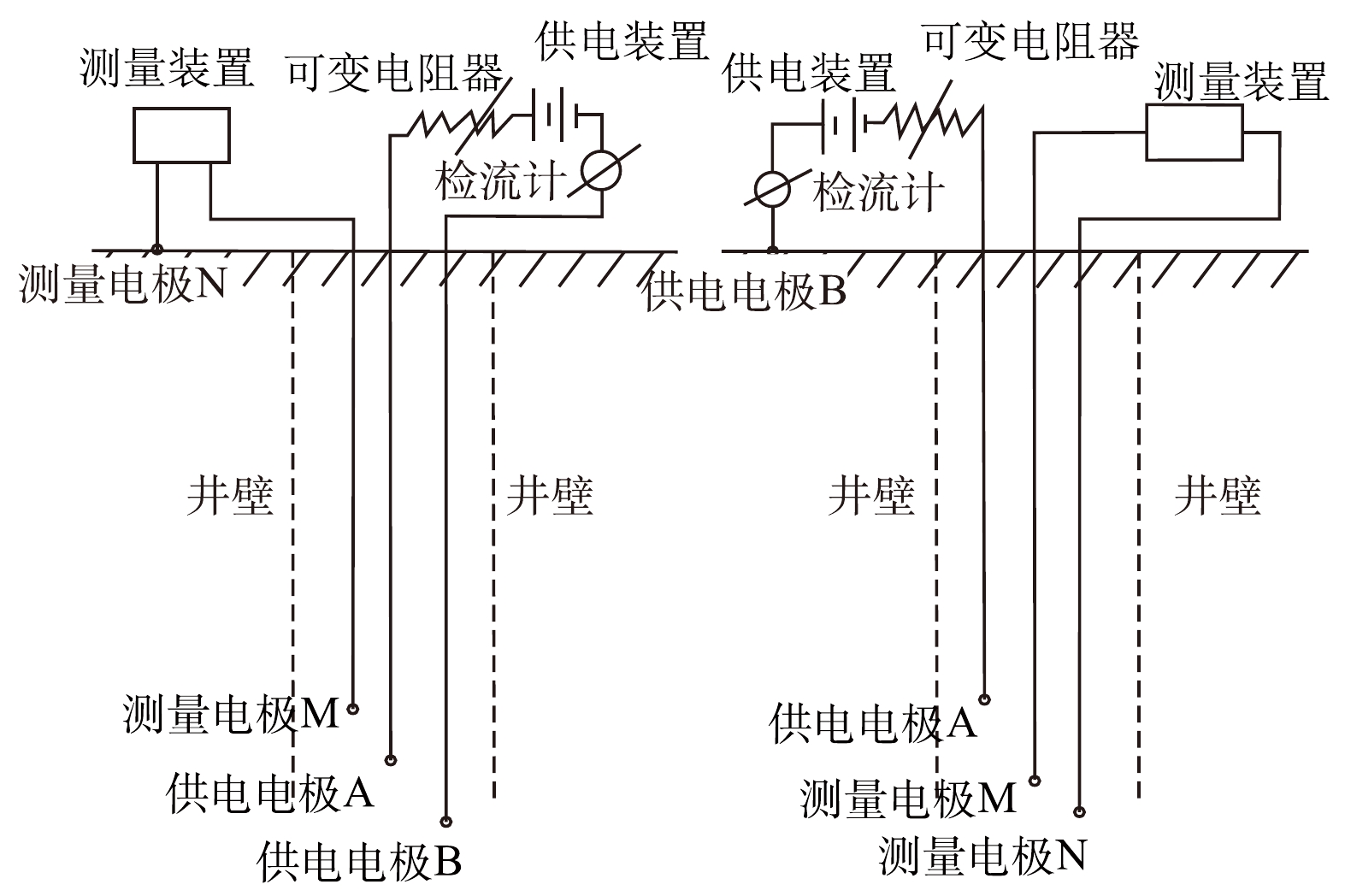
电阻率法测井是通过测量钻井剖面上各种岩石电阻率来区分岩石性质的方法,主要应用在石油和矿产勘探中。常规电阻率测井方法采用的是点测方法,效率比较低,但由于其方法简单,使用广泛,到目前为止,在划分钻井地质剖面和判断岩性等工作中仍然起着一定的作用[17]。如图1所示,在进行电阻率测井时,设有供电线路AB和测量线路MN。通过供电线路上的电极A、B供给电流,在井内建立电场,然后测量在测量回路上电极M、N的电位差
ΔUMN ,所测ΔUMN 大小取决于周围介质电阻率。ΔUMN 的变化则反映了沿井孔剖面上介质电阻率的变化。最后按式(1)计算电阻率,其中的装置系数K由式(2)计算(均匀各向同性介质全空间电阻率),并最终取平均值作为最终的电阻率。式中:
ρ 为岩土层视电阻率,Ω·m;ΔUMN 为电位差,mV;I为供电电流,mA;DAM、DAN、DBM、DBN分别为供电电极A、B与测量电极M、N之间的距离,m。 -
为了适应人工湿地的特殊情况,并提高数据采集效率,改进了电阻率测井方法,设计了高密度电阻率测井方法。高密度测井方法采用高密度电极探杆(图2)代替普通电阻率测井的电极系,测量方式类似于地面高密度电法的测量方式,只是把高密度电极通过电阻率探杆垂直布设在人工湿地床体中。
测量装置也与常规的测量方法不一样,常规电阻率测井一般使用三极装置。但人工湿地堵塞探测不适合使用三极装置,因为三极装置异常相对比较复杂,而且大多小型人工湿地由于尺寸原因,并不能满足布设“无穷远极”的条件,使测量数据容易产生较大误差。因此,在人工湿地堵塞探测中,测量装置采用对称四极装置(施伦贝尔装置),该装置不需要布设“无穷远极”,并且视电阻率数据异常简单,对于堵塞区域反映直接,易于解释。
-
对于单孔测井视电阻率数据而言,视电阻率数据反映的是井孔周围一定范围内的介质电阻率,在极距较小(由于人工湿地纵向尺寸较小,所以电阻率测量时使用的电极距较小)、介质分层比较单一的情况下,电阻率测量方法类似于电法勘探中取得岩土体电阻率数据的野外小四极测量方法(露头法)[18]。经实测,其测量得到的视电阻率近似等于介质的真电阻率。而在视电阻率的计算方面,采用全空间的视电阻率计算公式计算得到的视电阻率,除了边界附近存在较小的误差外,其他区域误差相对较小。因此,可以采用全空间的视电阻率计算公式计算视电阻率。
经测量,对于水饱和人工湿地来说,单一填料人工湿地可认为只有一层均匀介质,当不存在堵塞区域时,所测视电阻率近似等于介质的真电阻率;当存在堵塞区域时,所测视电阻率也基本接近堵塞体的电阻率。另外,当人工湿地为多层粒径不同的填料时,由于饱和填料的电阻率主要受孔隙率和所含溶液控制,电阻率差异很小,故可近似认为是电性均匀的介质[19]。但是,这种电阻率近似替代的方案要求在选择测量装置的时候需选择对称四极装置(施伦贝尔装置),三极装置无法实现。因此,对于用改进的高密度电阻率测井方法,可以直接利用测量得到的视电阻率数据近似代替电阻率数据进行分析,即使不用进行数据的反演工作也可取得较好的效果。
-
1)改进的单孔高密度测井法探测堵塞实验。实验采用水槽模拟的方式进行,水槽的长、宽、高分别为146、119和102 cm,仪器使用WDJD-2高密度电阻率测量系统,自制井中高密度电极杆(图2)[20],高阻堵塞体为石英砂。测量装置使用对称四极装置(施伦贝尔装置),每根高密度电极杆实接电极数位20,电极间距5 cm。高阻体直径约15 cm,形状为近似球体。以水槽下方角点设定为坐标原点,高阻体中心坐标为: x=70 cm,y=60 cm,z=62 cm。测量和测点布线为了避开水槽边界的影响,在水槽中间布设了6条测线,测线间距10 cm,其中,中间的3条测线位置分别为测线1(y=55 cm)、测线2(y=65 cm)、测线3(y=75 cm),每条测线按间距10 cm布置了6个测点(x=45~95 cm)。
2)VMOD模拟。地下水模拟工具较多,VMOD因其开源、具一定物理意义和参数化过程相对明晰,在世界范围内得到广泛应用。该模型是在由加拿大Waterloo水文地质公司在美国地质调查局(USGS)研发的MODFLOW[21]的基础上进行可视化集成开发,被水文地质学界认可的三维地下水流和溶质运移模拟的标准可视化专业软件系统[22-23]。
VMOD用三维有限差分法概化地下水系统,由水量平衡原理通过连续性方程(式(3))进行地下水系统动态求解[24]。
式中:
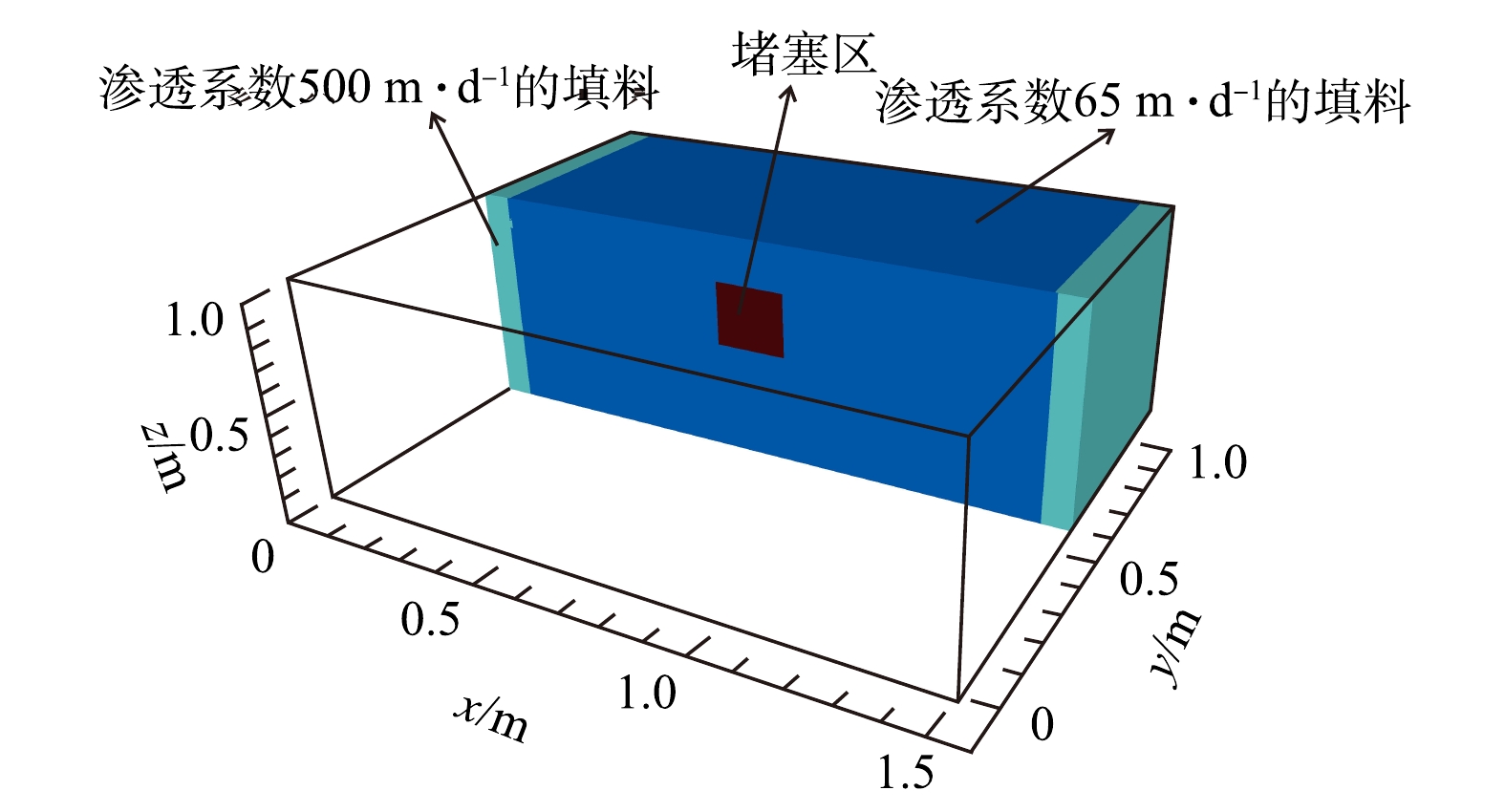
Kx、Ky、Kz 分别是沿x、y、z方向的渗透系数,m·d−1;h 为地下水头,m;W 为均衡期内地表地下沿垂向的交互通量,表示地下水系统的源、汇项构成,mm·a−1;Ss 表示多孔介质的储水系数(潜水含水层给水度μ ,m−1;t 表示时间,d。由于人工湿地堵塞区域和未堵塞区域的渗透系数不同,根据这个特点可以使用VMOD进行堵塞模拟。此次使用VMOD进行的流场模拟,模型的长、宽、高分别为146 、119和102 cm(图3),与水槽模拟实验相同。各个模拟参数由之前研究中的实验数据所得[25],主堆料场采用单层堆料,渗透系数为65
m⋅d−1 ,布水区和集水区渗透系数为500m⋅d−1 ,进水区设定为补给边界,补给量为2.3m⋅d−1 ,出水端设定为定水头边界(0.9 m);两侧概化为隔水边界,系统主体填料孔隙率均设置为0. 4,总孔隙率为0.45。当基质堵塞后,由基质的渗透系数会下降20%~40%[26],堵塞区的渗透系数设置为26m⋅d−1 。 -
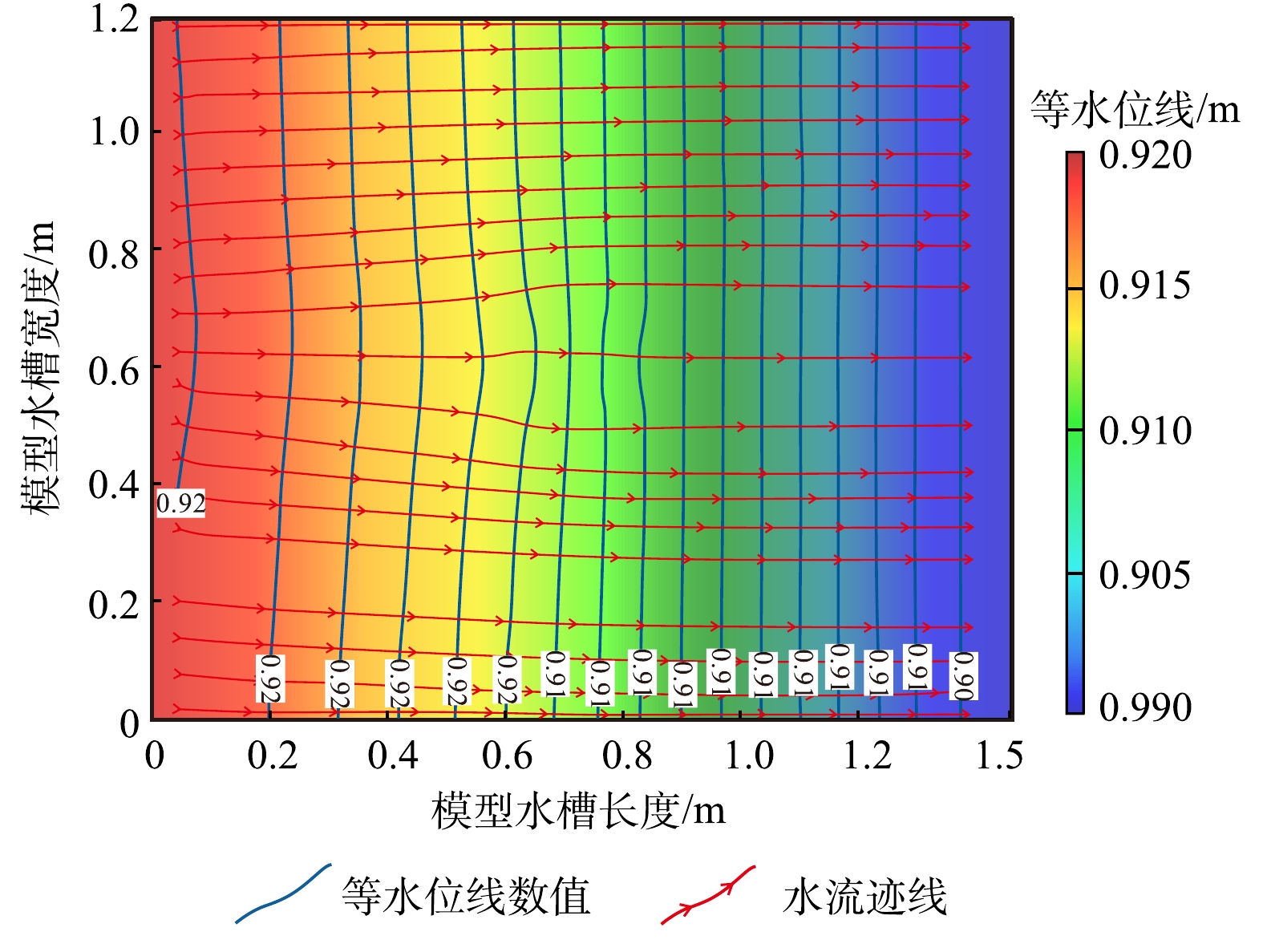
此次使用VMOD进行的流场模拟(图4),人工湿地模型使用的为20目石英砂岩,渗透系数为
65m⋅d−1 ,当堵塞后由于在泥沙和生物膜的共同作用下堵塞,渗透系数会下降20%~40%,通过不同渗透系数来实现模拟堵塞。由图4可以看出,等水位线在中间区域发生变化,两侧的等水位线向中间区域靠拢。这是由于此处渗透系数较小导致发生该变化。从而可以推断是由堵塞导致的渗透系数的变化。由流线也可以看出,流线在中间区域发生变化,两边的流线绕过中间的区域,且流线的密度也变得更加稀疏,也可以推断该区域的渗透系数较小,表明发生堵塞。 -
通过改进的高密度测井方法,根据设计的测点和电极间距,测量整个设计测量范围内的三维数据。每个平面测点布设的高密度电极系统测量了3组不同供电极距的视电阻率数据,通过分别提取所有测点的3组不同供电极距的数据,用这3组数据分别组成各条测线的二维断面数据并绘制二维断面视电阻率断面等值线图,根据视电阻率断面等值线图的特征可以对堵塞区域进行分析定位。
图5为供电极距DAB/2=7.5 cm (装置参数为DAM=DMN=DNB=5 cm,即最小供电极距状态下)时的视电阻率断面等值线图。沿x轴有效测量深度为7.5~87.5 cm。由图5(a)和图5(b)中可以看出,在高阻体周围的测线1和测线2的断面等值线图上,存在一个高阻封闭区域,该区域与高阻体的位置比较吻合;通过和人工湿地堵塞模拟流线图(图4)对比,与流场模拟得到的堵塞区也较吻合。另外,在测线1和测线2上,也只有靠近高阻体的x=65 cm和x=75 cm处的4个点视电阻率数值较大,其他测点都是背景值,没有受到高阻体的影响,其他测线由于没有靠近高阻体,视电阻率数据都比较平稳,和流场模拟的一样,流线平稳,都是背景值。而表层和底层电阻率偏高是由于边界处的测量不能满足全空间状态所致,这个还需要考虑半空间状态的影响,所以边界附近的视电阻率计算方法还需要进一步的改进。
图6为供电极距DAB/2=12.5 cm(装置参数为DAM=2DMN=DNB=10 cm)时的视电阻率断面等值线图。沿x轴有效测量深度为12.5~82.5 cm,相对于供电极距DAB/2=7.5 cm的有效范围有所缩小。由图6(a)和图6(b)中可以看出,在高阻体周围的测线1和测线2的断面等值线图上,存在一个高阻封闭区域,该区域与高阻体的位置比较吻合,但与供电极距DAB/2=7.5 cm的测线相比,该区域与高阻体的位置在纵向上吻合度稍差。这主要是由于供电极距的增大,堵塞体外围测点的视电阻率平均效应有所增强。
图7为供电极距DAB/2=22.5 cm(装置参数为DAM=4DMN=DNB=20 cm)时的视电阻率断面等值线图。沿x轴有效测量深度为22.5~72.5 cm,相对于供电极距DAB/2=12.5 cm的有效范围进一步缩小。由图7(a)和图7(b)中可以看出,在高阻体周围的测线1和测线2的断面等值线图上,存在的高阻封闭区域,与流场模拟得到的堵塞区吻合,由于供电极距的进一步增大造成综合效应增强,高阻区域与高阻堵塞体吻合度和分辨度进一步减弱,这主要是由于表层和底层对视电阻率测量和计算结果影响进一步增强。
综合上述3个供电极距的视电阻率断面等值线图的分析结果,可以得到3点结论。1)只要电阻率差异存在并且差异够大,改进的高密度电阻率测井方法能够较好的探测和定位人工湿地高阻堵塞区域,该方法是有效的。2)改进的高密度测井方法采用的数据供电极距不宜过大,如果供电极距过大,则不但有效测量范围会减小,而且异常效果由于受边界和电极距范围内介质综合效应的影响而变差。根据实验结果,建议高密度电阻率探杆的电极间距不大于5 cm,供电极距DAB/2不超过12.5 cm。3)该实验的视电阻率计算方法都是基于全空间条件进行,后续还需进一步研究边界处全空间条件和半空间条件的转换问题,在视电阻率的计算上需要研究全空间和半空间的混合算法,以期消除边界处的计算误差,增强边界处的分辨率。
另外,对于人工湿地工程实例来说,水饱和人工湿地未堵塞区域和堵塞区域的电阻率差异并不是很大,并不能保证有较好的探测效果。为此,我们提出了一种强化电阻率差异的人工湿地堵塞探测方法[27],通过在人工湿地中加入电解质溶液的方法来加大人工湿地未堵塞区域和堵塞区域的电阻率差异,可以提升人工湿地堵塞区域探测精度和探测效果。
-
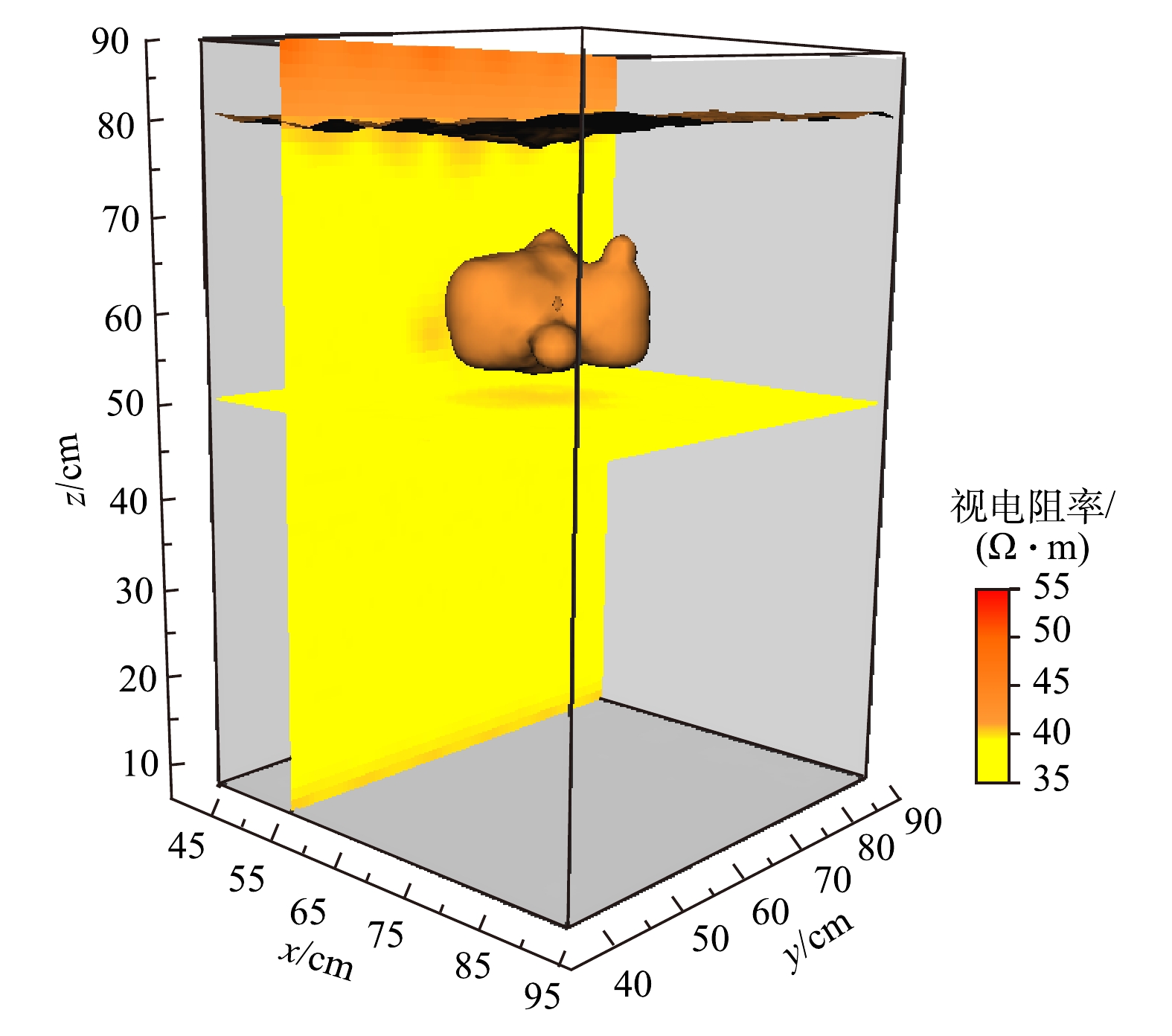
本次设计的单孔高密度测井法探测实验测量区域是三维区域,可以根据数据绘制三维立体图,以更好的对高阻异常体进行空间定位和有效展示。图8为供电极距DAB/2=7.5 cm时的视电阻率三维组合图件,可以更好的展示高阻体的空间位置和形态,更直观和精确的定位堵塞区域。
-
1)只要电阻率差异存在并且差异够大,改进的高密度电阻率测井方法能够较好地探测和定位人工湿地高阻堵塞区域。
2)改进的高密度测井方法采用的数据供电极距不宜过大,如果供电极距过大的话,不但有效测量范围会减小,而且异常效果由于受边界和电极距范围内介质综合效应的影响而变差。根据实验结果,建议高密度电阻率探杆的电极间距不大于5 cm,供电极距DAB/2不超过12.5 cm。
3)对于视电阻率的计算方面,采用全空间的视电阻率计算公式计算得到的视电阻率,除了边界附近存在较小的误差外,其他区域误差相对较小。因此,在方法探索阶段,可以采用全空间的视电阻率计算公式计算视电阻率。但后续还需进一步研究边界处全空间条件和半空间条件的转换问题,在视电阻率的计算上需要研究全空间和半空间的混合算法,以期消除边界处的计算误差,增强边界处的分辨率。
4)对于人工湿地堵塞探测的数据处理来说,根据探测数据绘制三维立体图,可以更好的展示高阻堵塞体的空间位置和形态,更精确的实现堵塞区域的定位。
5)对于人工湿地工程实例来说,人工湿地未堵塞区域和堵塞区域的电阻率差异并不是很大,并不能保证有较好的探测效果,可以通过在人工湿地中加入电解质溶液的方法来加大人工湿地未堵塞区域和堵塞区域的电阻率差异,提升人工湿地堵塞区域探测精度和探测效果。
基于电阻率法的人工湿地堵塞区域探测方法
Detection method of constructed wetland clogging based on resistivity method
-
摘要: 人工湿地污水处理技术已经得到广泛的应用,但目前对人工湿地堵塞问题,无法对堵塞区域进行精确定位。为了解决这个问题,根据潜流人工湿地结构和堵塞区域的特点,建立了长、宽、高分别为146、119和102 cm水槽物理实验模型,利用改进的高密度电阻率测井法开展了探测和定位人工湿地堵塞区域的实验研究,并结合人工湿地堵塞模型的Visual MODFLOW(VMOD)流场模拟特征,探讨了基于电阻率法探测和定位人工湿地堵塞区域的可行性。结果表明,改进的高密度电阻率测井法在电阻率探杆的电极间距不大于5 cm,供电极距DAB/2不超过12.5 cm的情况下,通过绘制电阻率数据的二维和三维视电阻率等值线图,能够更好地定位高阻体的空间位置和形态。可见,利用改进的高密度电阻率测井方法可以探测和定位人工湿地高阻堵塞区域,实现堵塞区域的精确定位。
-
关键词:
- 潜流人工湿地 /
- 堵塞 /
- 改进的高密度电阻率测井法 /
- VMOD /
- 堵塞定位
Abstract: Constructed wetland for sewage treatment has been widely used, but at present, the blocked area in constructed wetland can not be accurately located. To solve the problem, according to the characteristics of subsurface flow constructed wetland structure and blocked area, a physical experimental model of a flume with length, width and height of 146, 119 and 102 cm, respectively, was established. Experimental research on detecting and locating the blocked area of constructed wetland was carried out by using an improved high-density resistivity logging method. Combined with Visual MODFLOW (VMOD) flow field simulation characteristics of the constructed wetland blocking model, the feasibility of detecting and locating the blocked area of the constructed wetland based on the resistivity method was discussed. The experimental results show that the improved high-density resistivity logging method could well locate the spatial position and shape of high resistivity body by drawing two-dimensional and three-dimensional apparent resistivity contours of resistivity data under the condition that the electrode spacing of the resistivity probe rod and the power supply distance of DAB/2 were less than 5 cm and 12.5 cm, respectively. Therefore, the improved high-density resistivity logging method can be used to detect and locate the high resistance blocked area of constructed wetland, which can realize the accurate location of the blocked area. -
在过去几十年中,农业和工业活动以及城市社区的污水导致了严重的水源污染[1]。面对越来越多的污染,衍生了各种新兴的污水处理技术。以电化学为基础的电化学高级氧化工艺受到了人们的青睐。在电化学高级氧化体系中可以通过阳极直接氧化、阴极还原或产生具有强氧化活性的物质,如羟基自由基(∙OH),将有机污染物矿化为CO2和H2O等[2-4]。但是在传统的电化学体系(二维电极体系)中存在电流效率低、电极面积小等缺点,三维粒子电极体系应运而生[5-6]。三维粒子电极是在二维电解槽中加入粒子电极,以此形成三维粒子电极系统。粒子电极的加入,可以通过增大电化学反应的面积,或形成一系列微电解池提高污染物去除效率,因此粒子电极的选择对于三维电极体系至关重要[7-8]。
蒙脱石是土壤中一种常见的黏土矿物,是膨润土的主要组成成分[9]。蒙脱石资源储量丰富,价格低廉。蒙脱石矿物表面常带有负电荷,为中和负电荷达到电荷平衡,在矿物层间吸附了大量的水合阳离子,使得层间具有大量的可交换阳离子[10-11]。因此,蒙脱石层间域除了具有交换吸附等性质,还具有层间柱撑的特性。以铁对蒙脱石进行改性作为催化剂已经有许多的研究报道,但是到目前为止,大部分研究更多集中于光-Fenton体系或作为非均相催化剂应用于Fenton体系中,将其作为粒子电极应用于电化学体系尚未见相关报道[9, 12-13]。而且铁改性蒙脱石多以粉末状作为催化形式,使用后回收困难,这限制了其应用[14]。因此,研究铁改性蒙脱石作为粒子电极的性能有助于拓宽污染物光/电复合降解体系的应用,解决催化剂难回收的问题,具有一定的实用意义。
本研究以铁改性蒙脱石(Fe-Mt)制备三维粒子电极,首先通过SEM-EDS和XRD表征对粒子电极进行了形貌与物相分析,并探究了pH、粒子电极投加量、槽电压以及进出水流量对电化学粒子电极体系的影响;然后通过与二维电极体系比较确定了Fe-Mt作为粒子电极的有效性,结合自由基抑制实验以及溶液中相关物质的检测初步探究了Fe-Mt粒子电极对亚甲基蓝去除的强化机理;最后进行了Fe-Mt粒子电极的稳定性实验。该研究有助于拓宽铁改性蒙脱石在污染物光/电复合降解体系的应用。
1. 材料与方法
1.1 试剂与仪器
亚甲基蓝、无水碳酸钠(Na2CO3)、结晶硝酸铁(Fe(NO3)3·9H2O)、七水合硫酸亚铁(FeSO4·7H2O)、氢氧化钠(NaOH)等试剂均购自天津市盛和化学试剂有限公司,以上试剂均为分析纯。
1.2 材料制备
Fe-Mt催化剂和Fe-Mt粒子电极的制备。合成方法在参考文献基础上有所改进[15],步骤如下:高速搅拌条件下,将Na2CO3粉末缓慢加入0.2 mol·L−1的硝酸铁溶液中,控制好碱/铁比(OH/Fe摩尔比为1.0),将所得到的红褐色半透明铁柱撑液在室温下陈化24 h。然后,将适量蒙脱石加入去离子水中,制成2%的黏土浆液。在恒温水浴锅中保持60 ℃,缓慢滴入上述陈化好的铁柱撑准备液 (1 g蒙脱石样品滴加10 mmol Fe3+离子溶液)。持续搅拌2 h,所得的混浊液于室温下陈化24 h。陈化产物经无水乙醇洗涤3次,然后用去离子水离心-洗涤多次(至少6次)后在80 ℃下干燥至恒重为止,研磨过250目,密封备用。碱铁比为1.0样品标记为Fe-Mt。将制备好的Fe-Mt催化剂、黏土与成孔剂按照3∶6∶1配比在80 ℃烘干后,混合均匀,采用球磨机碾至粉末,加入适量水滚制成4~6 mm小球,然后在马弗炉中以600 ℃煅烧40 min,自然冷却至室温备用。
1.3 电解实验
静态实验。实验在500 mL容器中进行(图1)。称取20 mg·L−1的亚甲基蓝溶液,使用H2SO4调节pH至3.0。加入以1.5 g·L−1的Na2SO4作为支持电解质,加入0.2 mmol·L−1的FeSO4·7H2O作为Fenton反应催化剂,充分溶解后倒入电解槽中。将一定量的粒子电极加入至电解槽中,以石磨棒与活性炭纤维分别作为阳极与阴极,电极板间距为6 cm,调节至电压为5 V进行电解。电解过程中曝气头持续在阴极进行恒流曝气,流量为3.0 L·min−1,粒子电极在使用前预先在亚甲基蓝溶液吸附达到饱和。
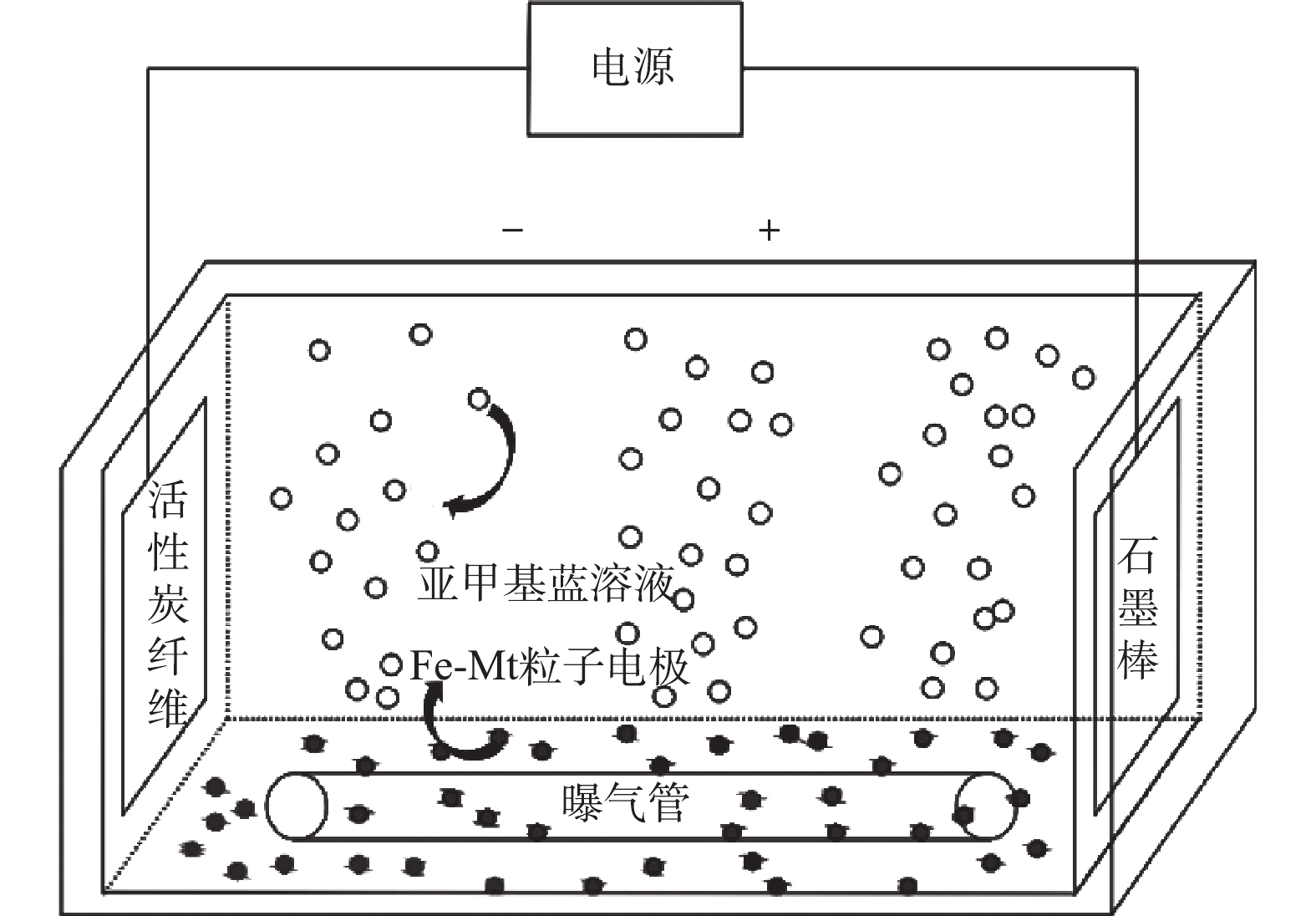 图 1 Fe-Mt三维电极反应装置图Figure 1. Diagram of Fe-Mt three-dimensional electrode reaction device
图 1 Fe-Mt三维电极反应装置图Figure 1. Diagram of Fe-Mt three-dimensional electrode reaction device连续流实验。在静态实验装置的左右两端分别安装一台BT100-2J调速型蠕动泵,控制相同的进出水流量。采用配制好的浓度为20 mg·L−1的亚甲基蓝溶液作为进水电解液。
1.4 表征与测试方法
采用配有EDS分析系统的Quanta 200FEG型场发射环境扫描电镜对制备的样品进行形貌测试表与表面元素组成测试。D/max-IIIB型X-射线衍射光谱仪(日本)对样品物相进行表征测试。表征过程中的管电压为40 kV,管电流为30 mA。测试结果与JCPDS(粉末衍射标准联合会)标准卡片进行比对。电解液中的H2O2 浓度采用草酸钛钾比色法测定。采用1,10-邻菲罗啉分光光度法(HJ/T 345-2007)测定溶液中总溶解性铁离子浓度。YG900G10010型数字直流稳压稳流电源购自上海翼昇电子有限公司。SL1000便携式多参数分析仪购自美国HACH公司。电子分析天平购自梅特勒托利多仪器(上海)有限公司。KH-50B型超声波清洗器购自昆山禾创超声仪器有限公司。SB-178型恒流曝气泵购自Sobo公司。
2. 结果与分析
2.1 粒子电极的表征
1) Fe-Mt粒子电极的表面形貌与元素表征。图2是Fe-Mt三维粒子电极的SEM-EDS表征结果。由图2(a)可见,制备出的三维粒子电极是一种形状较为规则的圆形小球,粒径为4~6 mm内。Fe-Mt三维粒子电极主要由浅黄色黏土与深红色Fe-Mt混合烧制而成,因此,Fe-Mt三维粒子电极呈深黄色。在前期粒子电极烧制过程中发现当煅烧温度过高,尤其在大于800 ℃时烧制成的粒子电极结构疏松,与水接触后结构发生塌陷现象,且粒径越大越明显。而根据5 µm下SEM影像显示,本研究在600 ℃煅烧成的 4~6 mm粒径的Fe-Mt三维粒子电极表面结构质密,进一步放大倍数显示粒子电极呈现不规整的乱石结构。EDS表征(图2(c))显示粒子电极所含元素种类较多,Si、Ca、Na、O与Mg等是蒙脱石与黏土常见的元素[16]。其中,O和Si所占权重最大,分别为53.78%和22.12%。根据EDS测试可以明显看出粒子电极含有一定量Fe元素,约占8.75%。
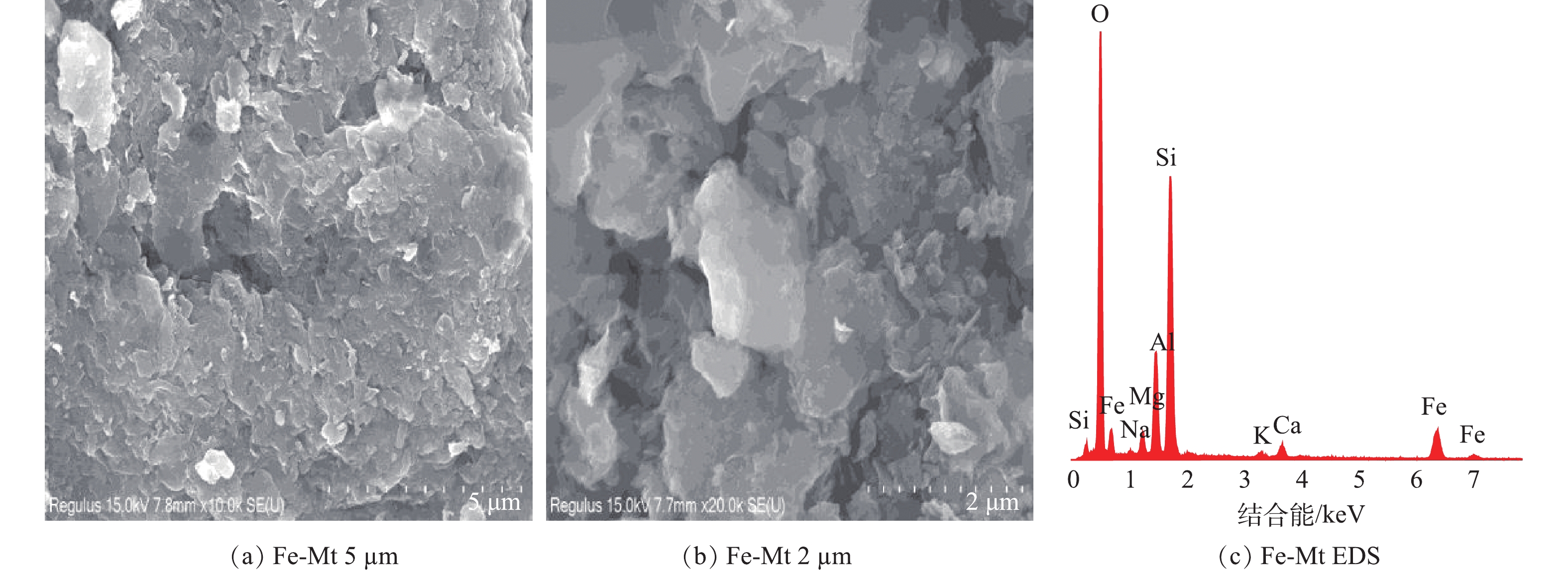 图 2 Fe-Mt粒子电极的SEM-EDS表征Figure 2. SEM-EDS characterization of the Fe-Mt particle electrode
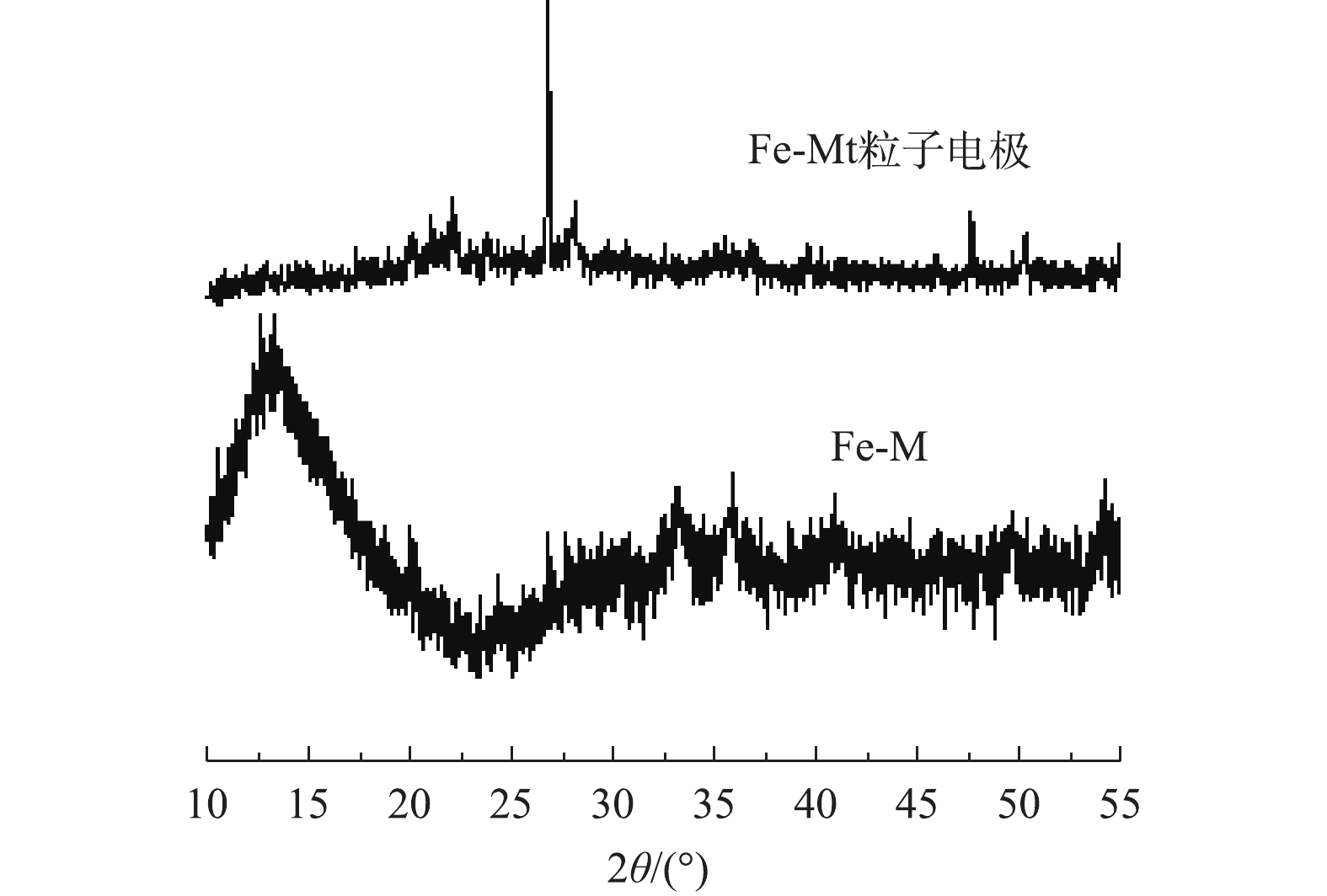
图 2 Fe-Mt粒子电极的SEM-EDS表征Figure 2. SEM-EDS characterization of the Fe-Mt particle electrode2)Fe-Mt粒子电极的XRD表征。图3分别是Fe-Mt与Fe-Mt粒子电极的XRD衍射图。可以清楚地观察到在2θ角分别为33.2°和35.7°的α-Fe2O3衍射峰[17]。然而Fe-Mt粒子电极的衍射图谱中α-Fe2O3衍射峰强度较弱,在20.8°与26.6°出现了衍射强度较高的特征衍射峰,通过对比pdf卡片,是SiO2的特征衍射峰,与EDS的表征结果一致。这说明制备成功的Fe-Mt粒子电极主要以SiO2为主要组成,这是其黏土组分占比较大导致的。
2.2 对亚甲基蓝去除的影响因素分析
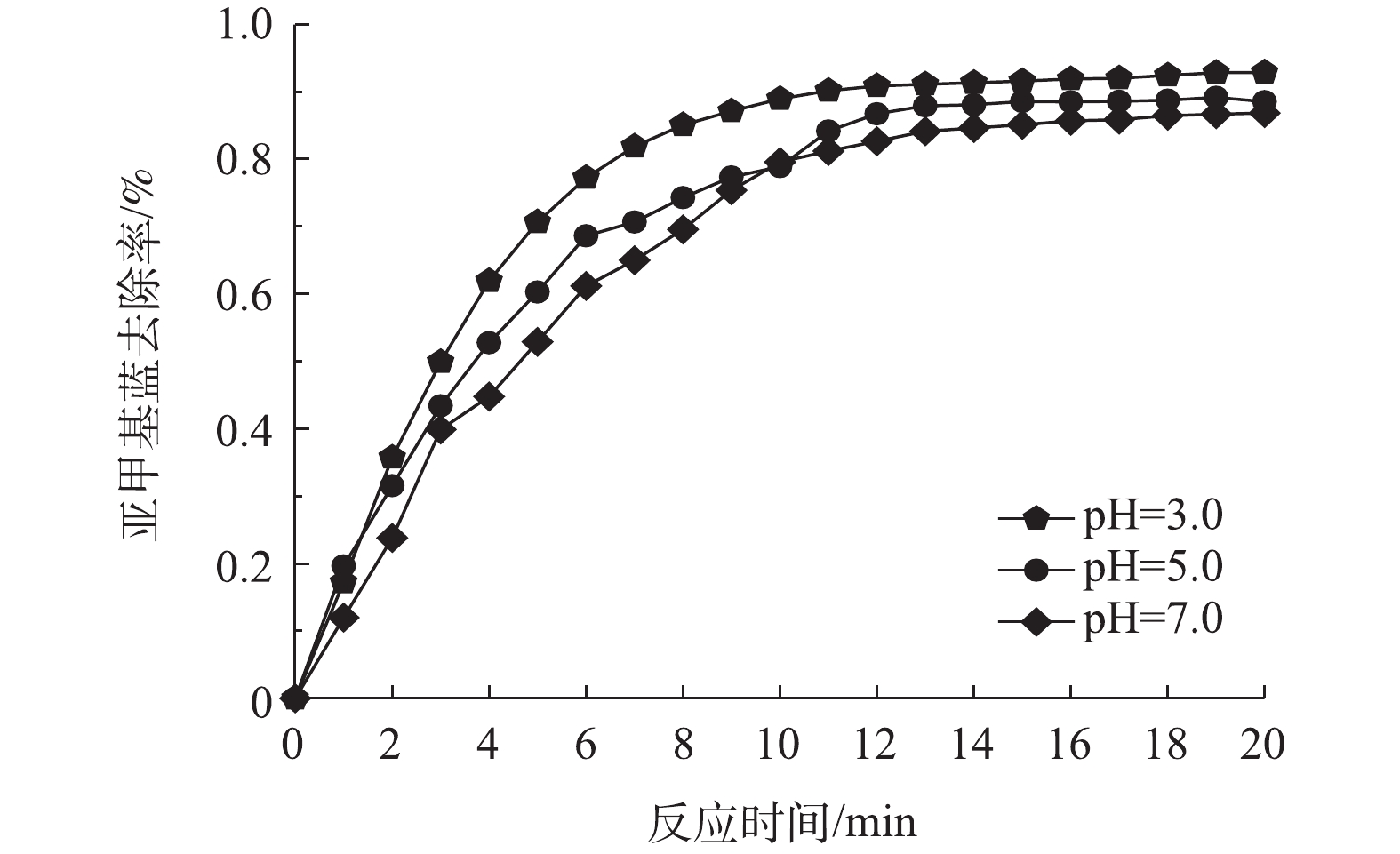
1) pH对亚甲基蓝去除率的影响。在电化学体系中,pH是影响污染物去除的主要影响因素之一[18]。酸性条件往往有助于污染物的去除,一方面,因为活性物质羟基自由基的氧化活性随pH升高而降低,另一方面,pH的增加会导致电化学体系中金属盐类催化剂的水解,从而降低污染物去除率[19-21]。图4显示了pH对Fe-Mt三维粒子电极的影响。可以看出随着pH增加,亚甲基蓝去除率降低。在前14 min左右亚甲基蓝去除率变化较明显,随着亚甲基蓝浓度的不断降低,去除率随时间变化逐渐变缓。在pH=3.0时,亚甲基蓝去除率最高为92.91%,比pH=7.0时提高了约7%,去除率变化幅度并不明显。因此,Fe-Mt三维粒子电极的投加有助于拓宽电化学体系pH的有效作用范围。Fe-Mt三维粒子电极的投加一方面能够增大电极反应面积,另一方面可以作为非均相催化剂,避免了金属离子催化剂的水解,因此,有效拓宽了降解亚甲基蓝的pH适用范围[22-24]。
2)粒子电极投加量对亚甲基蓝去除率的影响。在槽电压5 V、pH=3.0、FeSO4·7H2O为0.2 mmol·L−1、支持电解质Na2SO4为1.5 g·L−1的条件下,改变Fe-Mt粒子电极投加量,探究投加量对三维粒子电化学体系的影响,结果如图5所示。可以看出粒子电极投加量从5 g·L−1增加至10 g·L−1的过程中,亚甲基蓝去除率有所升高,继续增大粒子电极投加量至20 g·L−1,亚甲基蓝去除率反而降低。粒子电极的投加会在电化学体系形成3种电流,即短路电流、旁路电流和反应电流,而发挥有效作用的是反应电流。粒子投加量过多将占用反应体系空间,降低有机污染物传质效率,同时增加短路电流,降低电流效率[7, 25]。因此,该体系中最佳的粒子电极投加量是10 g·L−1。
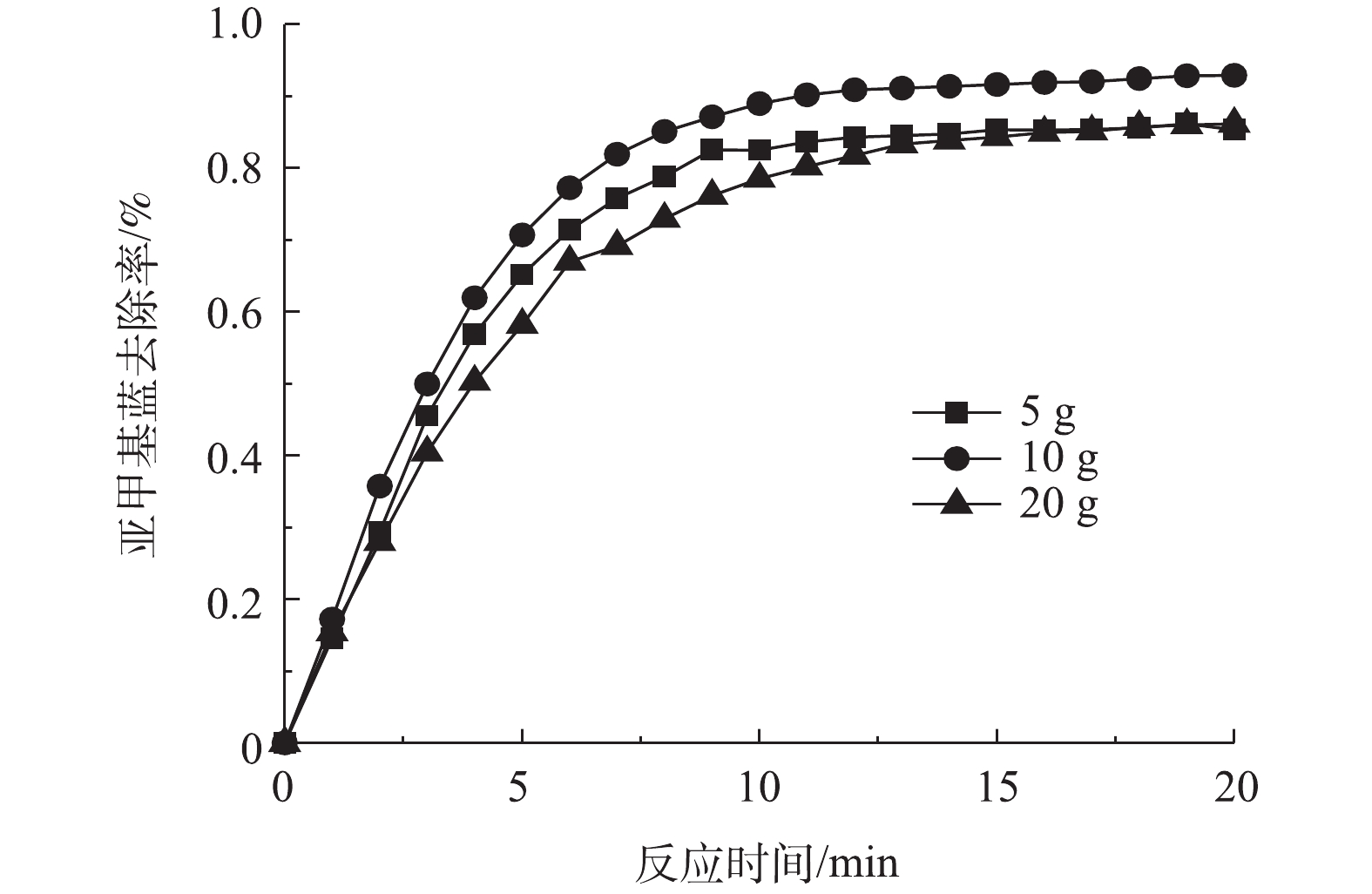 图 5 粒子电极投加量对亚甲基蓝去除率的影响Figure 5. Effect of particle electrode dosage on methylene blue removal rate
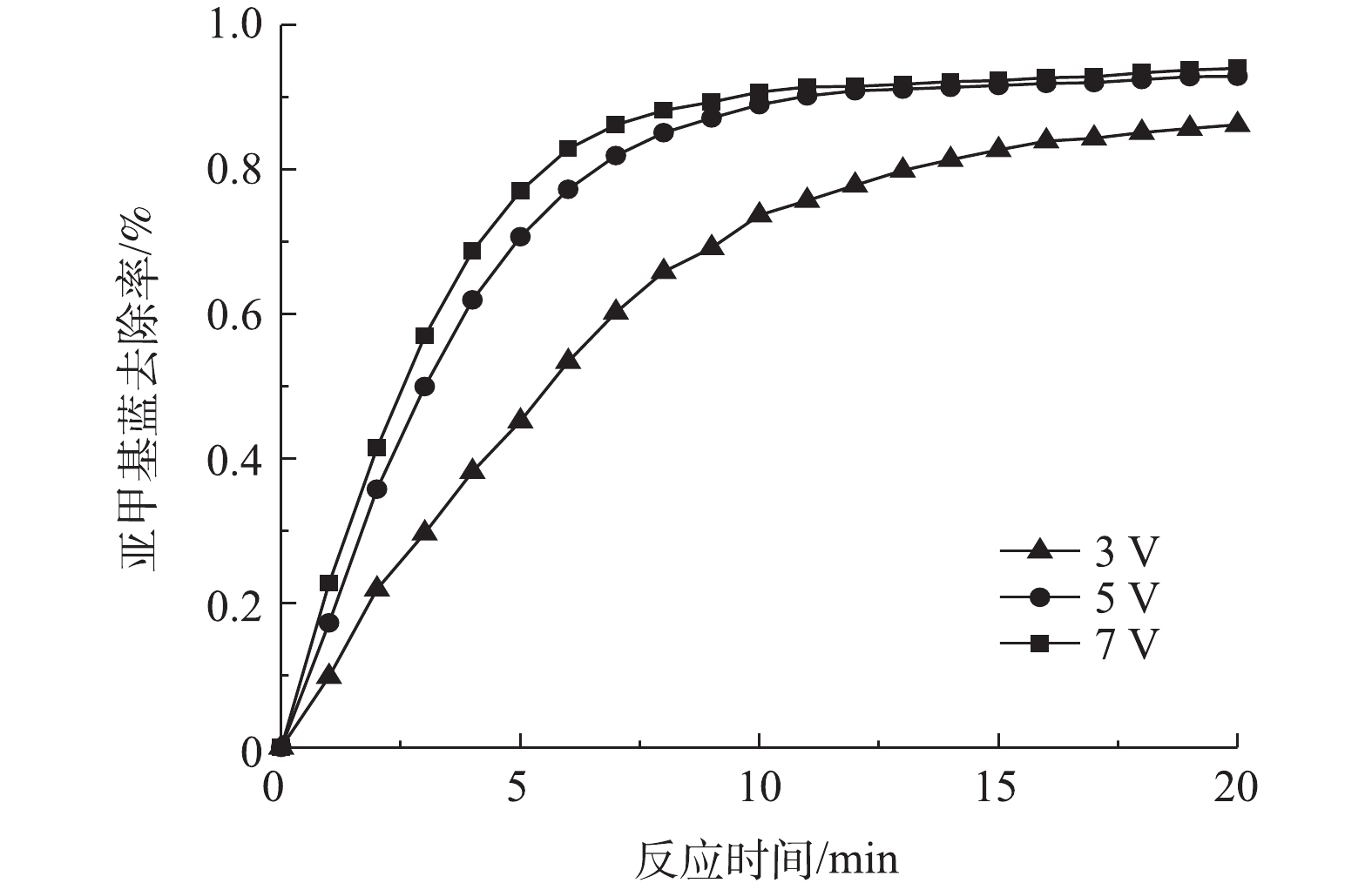
图 5 粒子电极投加量对亚甲基蓝去除率的影响Figure 5. Effect of particle electrode dosage on methylene blue removal rate3)槽电压对亚甲基蓝去除率的影响。在电解体系不变的情况下,槽电压值会影响体系电流密度,进而影响亚甲基蓝去除率。因此,在粒子电极投加量为10 g·L−1、pH=3.0、FeSO4·7H2O为0.2 mmol·L−1、支持电解质Na2SO4为1.5 g·L−1的条件下,分别调节槽电压为3、5和7 V,探究了槽电压对三维粒子电极体系的影响,结果如图6所示。由图6可知,当槽电压从3 V升至5 V时,亚甲基蓝的去除率随之升高,但是继续增加槽电压至7 V后,亚甲基蓝的去除率升高幅度不大。这是因为在一定范围内增加槽电压,体系电流密度也会增大,阴极通过2电子反应产生的H2O2量也随之增大。H2O2的产生能够在粒子电极催化下产生活性物质去除亚甲基蓝。而当槽电压进一步增大时亚甲基蓝去除率增长不大,这与副反应的产生有关,如阴极的4电子反应与2电子反应竞争以及阳极对H2O2的直接氧化作用消耗了H2O2。因此,本研究中最适槽电压为5 V。
4)亚甲基蓝去除的连续流实验。连续流实验中的进出水流量能够影响水力停留时间,从而对亚甲基蓝去除率产生影响。因此,在Fe-Mt三维粒子电极体系中,以连续进出水的方式考察了进出水流量对亚甲基蓝的去除效果的影响,结果如图7所示。由图7可知,随着流量的不断减少,亚甲基蓝去除率逐渐升高。当流量由8.37 mL·min−1降低至6.29 mL·min−1时,亚甲基蓝去除率增幅较小。由此可见,进出水流量的调控对于反应体系的去除率起到重要的作用。
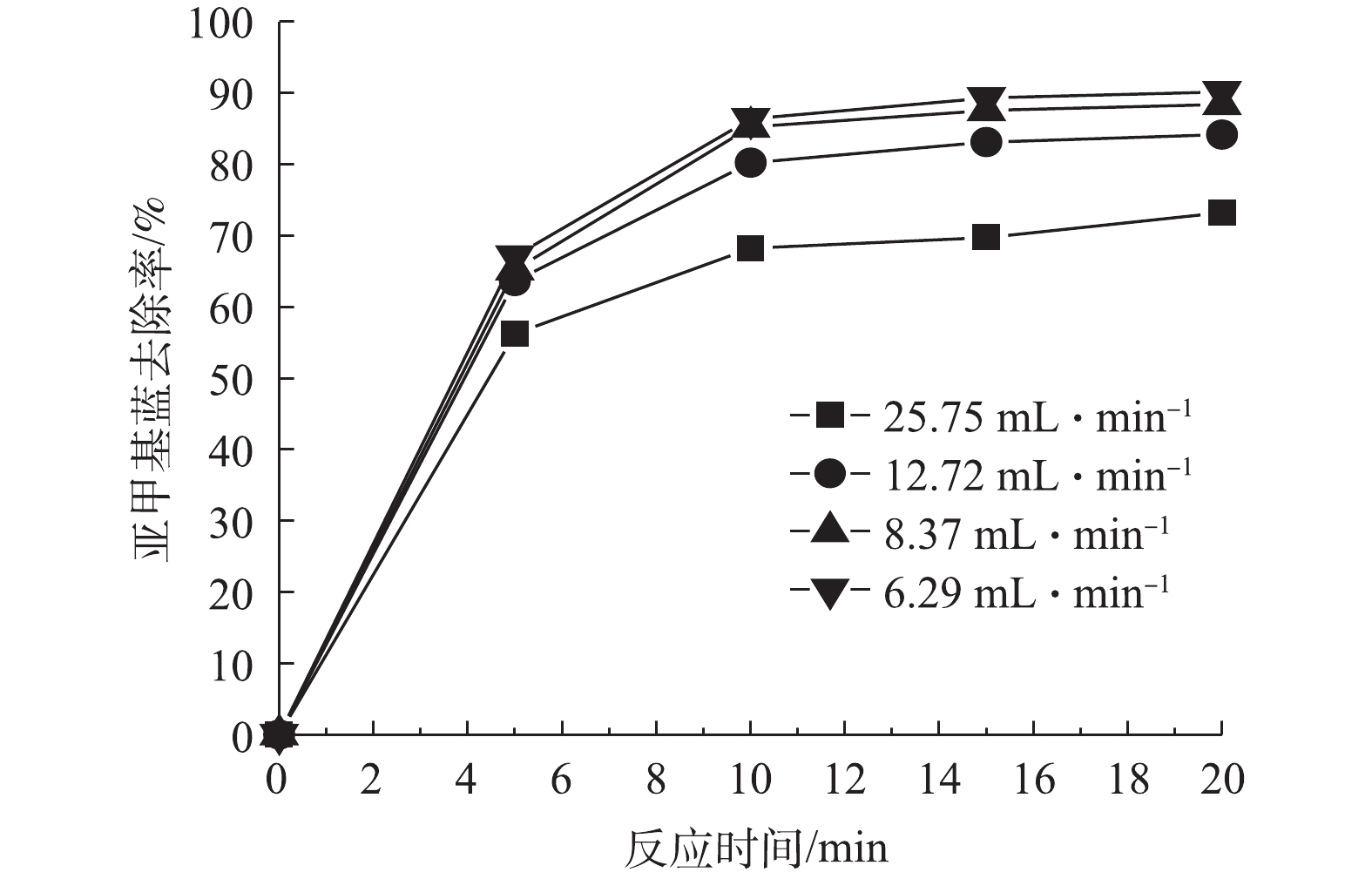 图 7 进出水流量对亚甲基蓝去除率的影响Figure 7. Effect of inlet and outlet water flow on methylene blue removal rate
图 7 进出水流量对亚甲基蓝去除率的影响Figure 7. Effect of inlet and outlet water flow on methylene blue removal rate2.3 不同体系对亚甲基蓝的去除效果对比
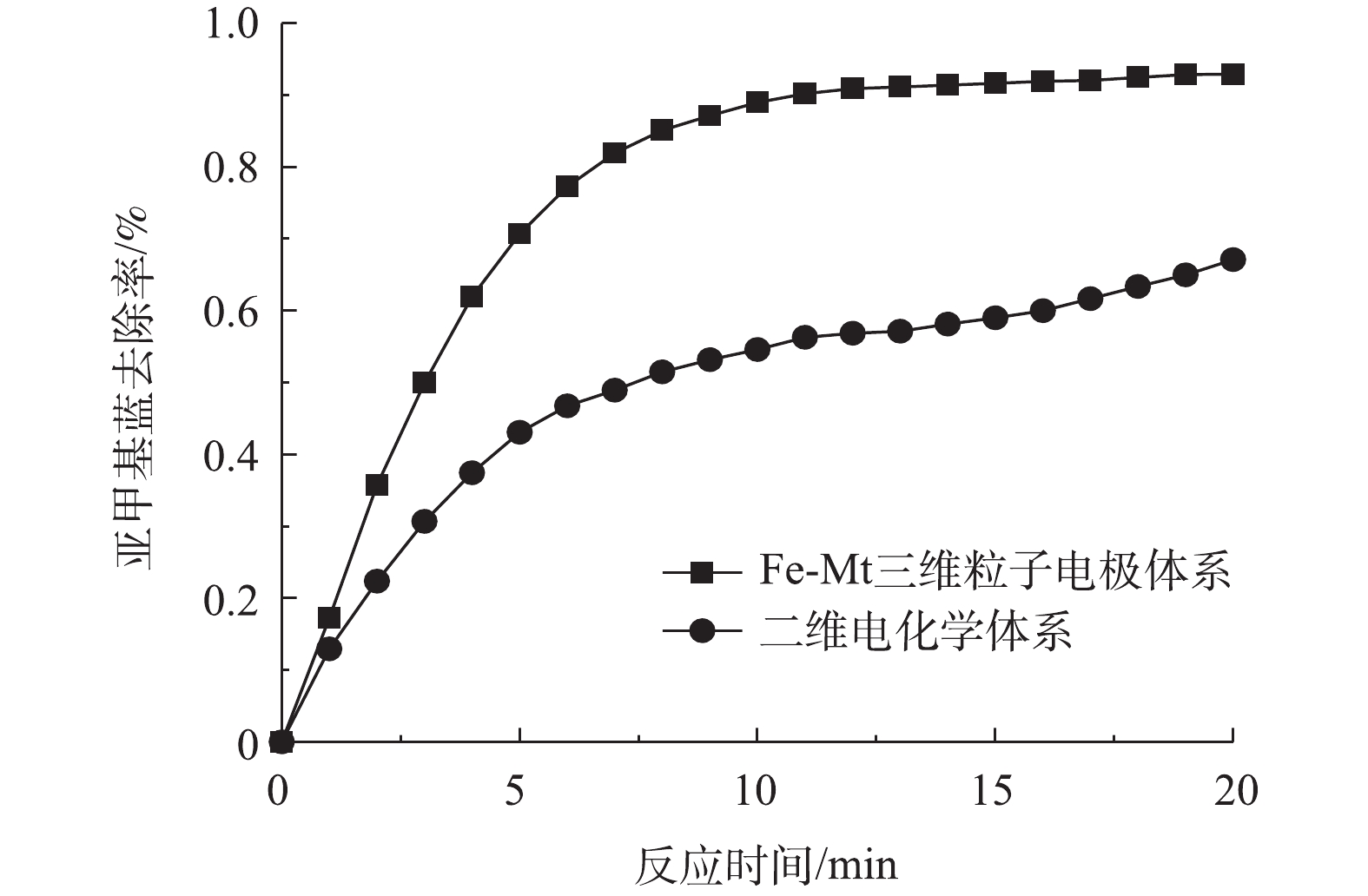
图8为在相同的电解条件下三维粒子电极体系与二维电化学体系对亚甲基蓝去除效果的对比。在Fe-Mt粒子电极投加量为10 g·L−1、电解20 min后,三维粒子电极体系较二维电化学体系对亚甲基蓝的去除率提高了约25%。因此,以Fe-Mt作为粒子电极应用于电化学体系是可行的。目前对于Fe-Mt的应用多集中于光-Fenton体系或非均相Fenton体系,其应用困难之一是Fe-Mt催化剂的回收性能。Fe-Mt作为催化剂投加量少,多以粉末状态分散在溶液中,应用过后难以回收[12-13]。该实验结论表明将其制作为三维粒子电极,可以有效发挥三维粒子电极的催化作用,有助于催化剂的回收。此外,Fe-Mt粒子电极也可以延伸作为光-Fenton体系的催化剂,对于光电复合体系的应用具有重要的价值。
2.4 三维粒子电极体系对亚甲基蓝的去除机理
在Fe-Mt三维粒子电极体系中,对亚甲基蓝去除起作用的可能途径主要包括以下5条:在阳极直接氧化亚甲基蓝;溶液中添加的Fe2+(0.2 mmol·L−1)与阴极产生的H2O2反应产生∙OH氧化亚甲基蓝;在酸性条件下,粒子电极溶出额外的Fe2+,Fe2+与阴极产生的H2O2反应产生∙OH氧化亚甲基蓝;Fe-Mt粒子电极的吸附作用去除亚甲基蓝;Fe-Mt粒子电极直接催化H2O2产生∙OH氧化亚甲基蓝。针对这5种可能的路径,本研究通过向溶液加入∙OH抑制剂(甲醇)以及对H2O2和总溶解性铁离子的检测初步探究了Fe-Mt三维粒子电极体系对亚甲基蓝的去除机理,结果如图9所示。可以看出粒子电极的吸附作用对亚甲基蓝的去除作用十分有限,吸附20 min亚甲基蓝去除率仅7.34%(图9(a))。2D(二维电化学直接氧化,未加入Fe-Mt粒子电极)体系亚甲基蓝去除率约67.1%,当向2D体系加入∙OH抑制剂(甲醇)后,亚甲基蓝去除率下降至21.88%,这表明2D体系主要靠阳极直接氧化以及外加的Fe2+(0.2 mmol·L−1)与H2O2反应产生∙OH进而氧化亚甲基蓝。当向3D体系加入甲醇后,亚甲基蓝去除率下降至36.73%,这表明3D氧化体系除了依靠阳极对亚甲基蓝直接氧化外,体系产生的大量∙OH起到主导作用。图9(b)显示了3D体系与2D体系中H2O2产量随时间的变化。可以看出,2D体系H2O2产量明显高于3D体系,因此,可以确定在3D体系中,催化剂对H2O2活化效率明显高于2D体系。
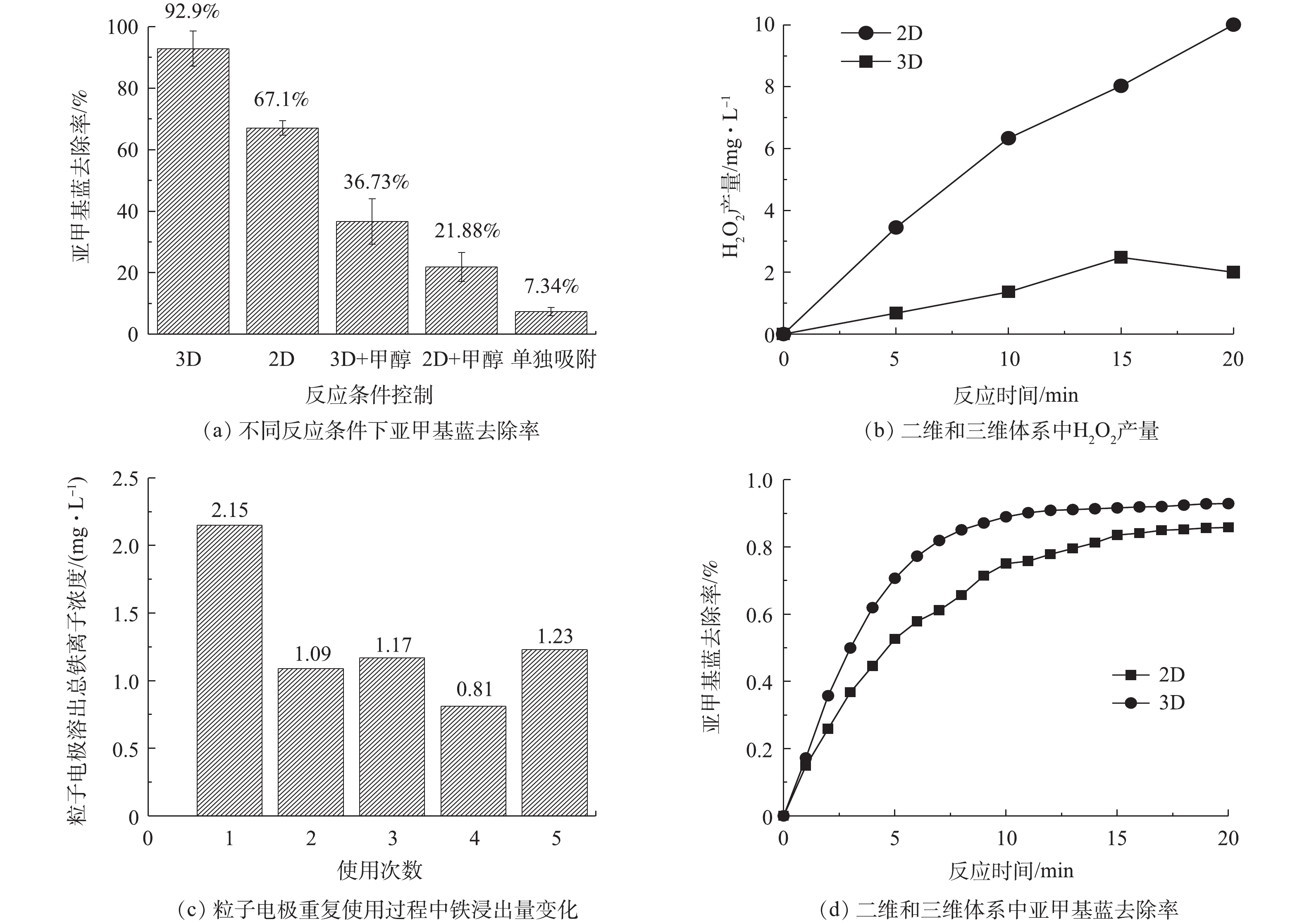 图 9 Fe-Mt粒子电极对亚甲基蓝的去除机制Figure 9. Removal mechanism of methylene blue by Fe-Mt particle electrode
图 9 Fe-Mt粒子电极对亚甲基蓝的去除机制Figure 9. Removal mechanism of methylene blue by Fe-Mt particle electrode为了进一步探明3D体系是依靠Fe-Mt粒子电极直接催化还是依靠额外的铁离子溶出对H2O2进行活化,对3D体系溶液中总溶解性铁离子的量进行了测定。在2D体系反应结束后总铁离子测量值约0.17 mmol·L−1(减少的铁离子浓度与铁离子的沉淀有关),因此,以3D体系总溶解性铁离子与0.17 mmol·L−1(约9 mg·L−1)的差值确定Fe-Mt粒子催化剂溶出的总铁离子浓度,结果如图9(c)所示。可以看出,在第1次使用时,3D体系产生了最高的溶解性总铁离子浓度,随着使用次数的增多,溶解性总铁离子浓度逐渐降低。因此,3D体系产生的溶解性铁离子对H2O2进行均相催化产生∙OH也是亚甲基蓝去除的途径之一。图9(d)为在向2D体系中加入0.25 mmol·L−1的Fe2+条件下与3D体系的亚甲基蓝去除效果的对比情况。可见即使向2D体系加入的Fe2+浓度大于3D体系溶解性的总Fe2+浓度,亚甲基蓝去除率依然低于3D体系。这表明3D体系溶出的铁离子不足以使其产生高的亚甲基蓝去除率。因此,Fe-Mt粒子电极对H2O2的直接催化也对亚甲基蓝去除产生作用。
终上所述,Fe-Mt三维粒子电极体系对亚甲基蓝去除的途径具有多样性。阳极的直接氧化能够去除一部分亚甲基蓝,而粒子电极的加入能够进一步提高亚甲基蓝的去除率。在酸性条件下,阴极能够通过2电子反应产生H2O2,H2O2能够被Fe-Mt粒子电极额外溶出的Fe2+催化而产生∙OH,再进一步氧化亚甲基蓝。Fe-Mt粒子电极本身具有一定的吸附作用,这加速了亚甲基蓝与粒子电极表面的传质过程。亚甲基蓝接近粒子电极表面后,Fe-Mt粒子电极直接催化H2O2产生∙OH,对亚甲基蓝进一步降解实现了吸附-氧化的协同作用。基于此,3D体系才比2D体系对亚甲基蓝具有更高的去除率。
2.5 粒子电极的可重复利用性
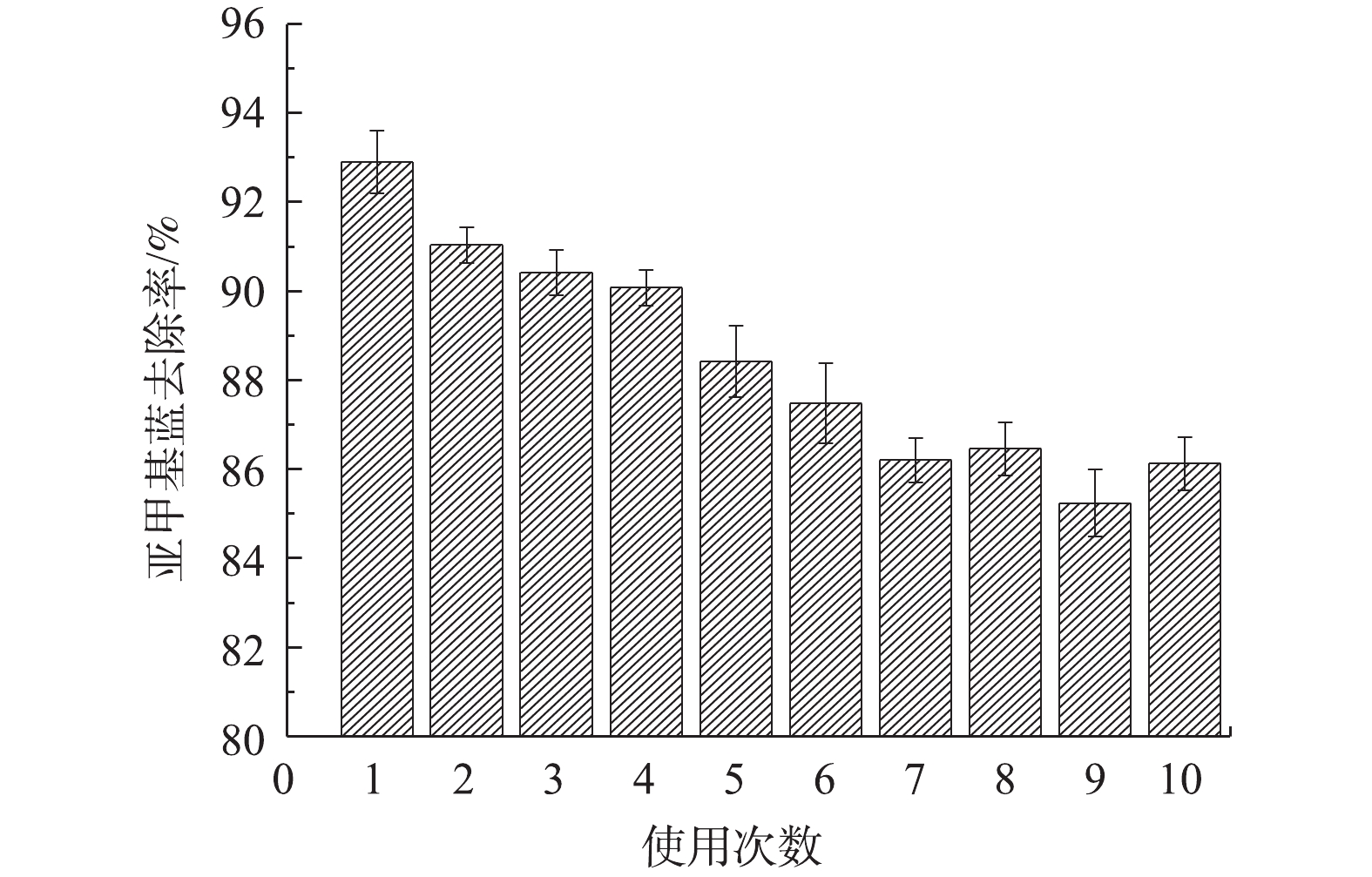
材料的稳定性是决定其应用性能的重要指标。图10为电极材料的使用次数对亚甲基蓝去除率变化的影响情况。可以看出,随着使用次数的增加,亚甲基蓝去除率呈下降趋势,重复使用至第10次后,去除率下降约7%,这说明Fe-Mt三维粒子电极具有良好的电化学催化活性。由图9(c)可知,在粒子电极重复使用的过程中,粒子电极表面的铁不断融出至溶液中,且随着使用次数的增加,铁离子溶出量减少,这表明粒子电极有效活性位点的减少。此外,粒子电极在重复使用过程中存在吸附-氧化耦合的过程,亚甲基蓝分子不断在粒子电极表面积累,其可能掩盖了粒子电极表面的活性位点,从而进一步降低了催化活性。
3. 结论
1) Fe-Mt三维粒子电极体系能够将亚甲基蓝去除率提高约25%,这证明其作为粒子电极的有效性。
2)将pH由3.0增至7.0后,亚甲基蓝去除率降低了7%,表明Fe-Mt粒子电极的投加可拓宽电化学体系去除污染物的有效pH范围。
3)除了阳极对亚甲基蓝的直接氧化,Fe-Mt粒子电极还能够对H2O2实现直接与间接催化,并结合自身一定的吸附性能对亚甲基蓝实现吸附-氧化降解去除。
-
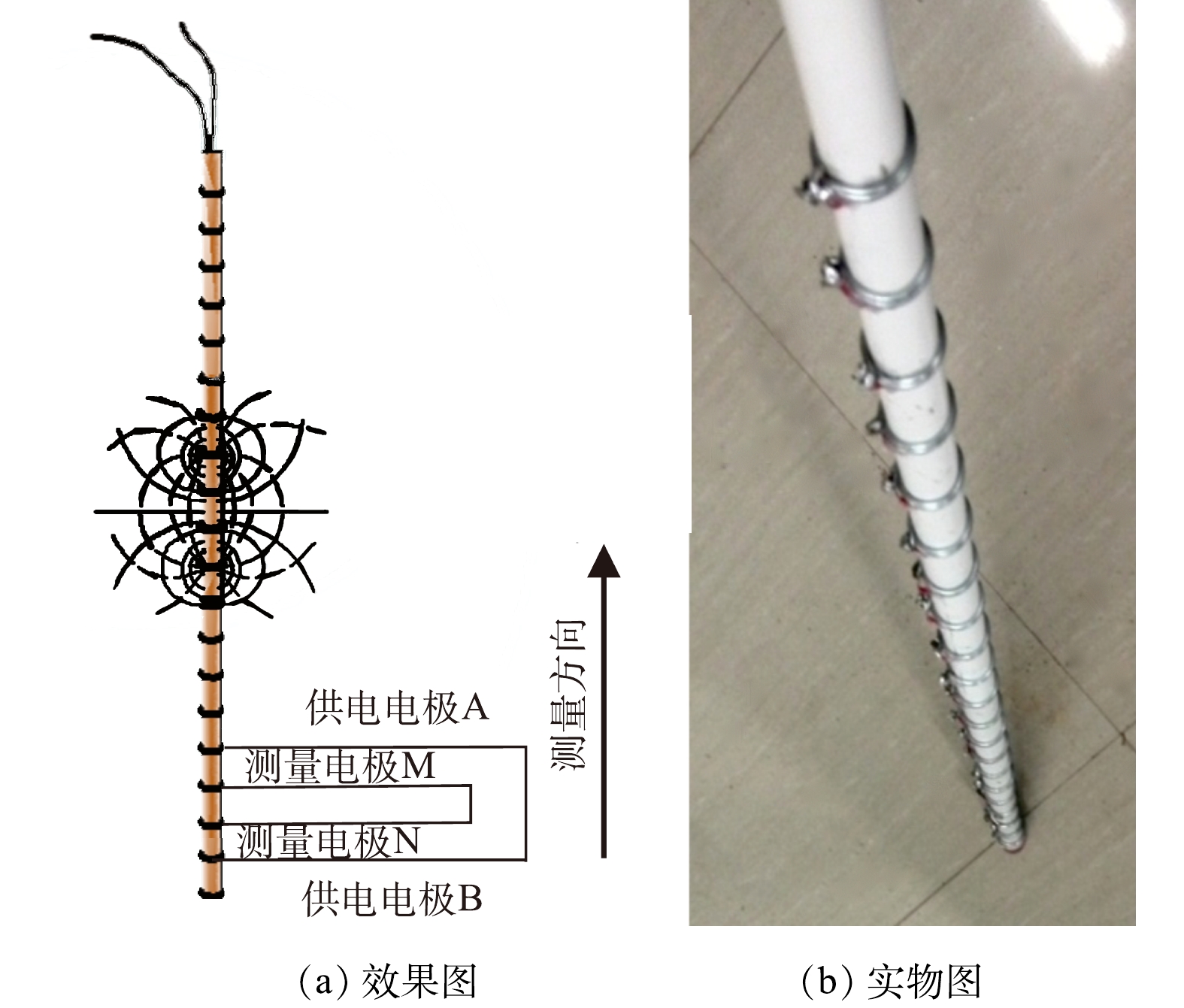
图 2 改进的高密度电阻率电极杆与实物图
Figure 2. Improved high density resistivity electrode rod and physical diagram
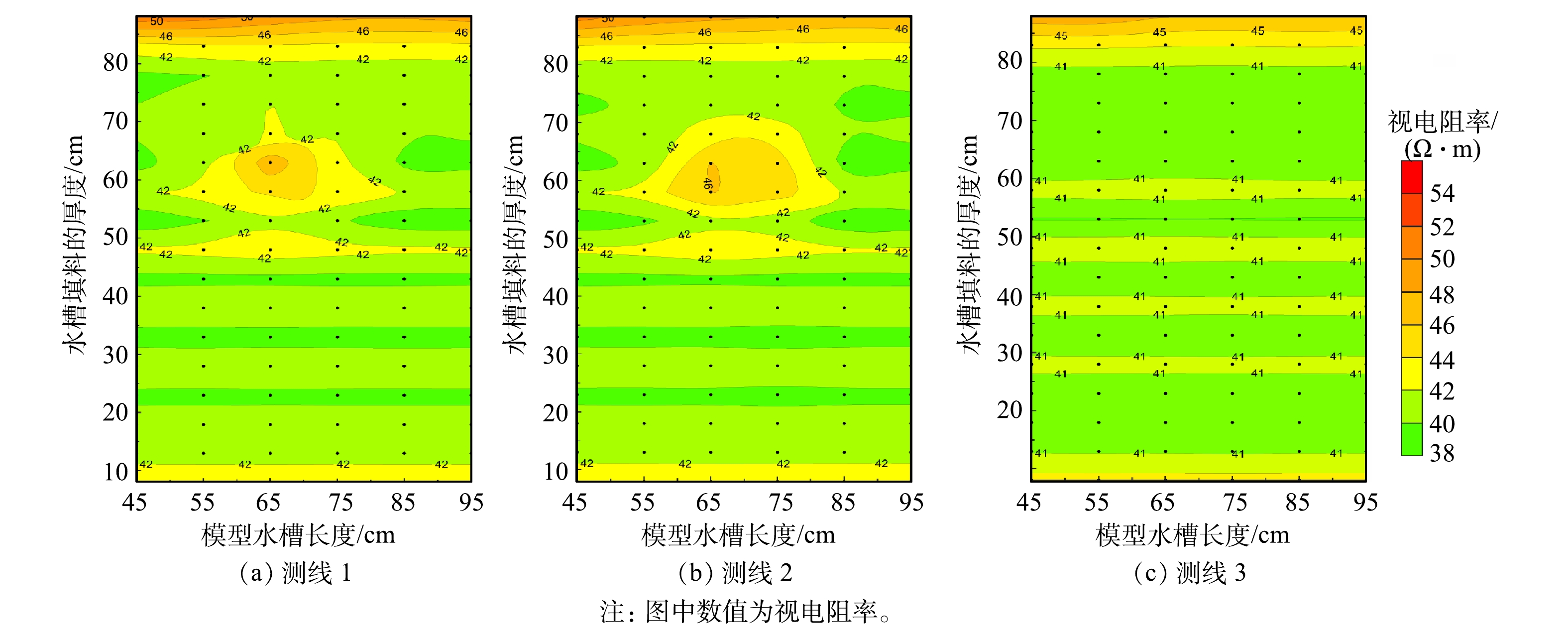
图 5 供电极距DAB/2=7.5 cm的视电阻率断面等值线图
Figure 5. Apparent resistivity cross-section contour map at the supply pole distance DAB/2=7.5 cm
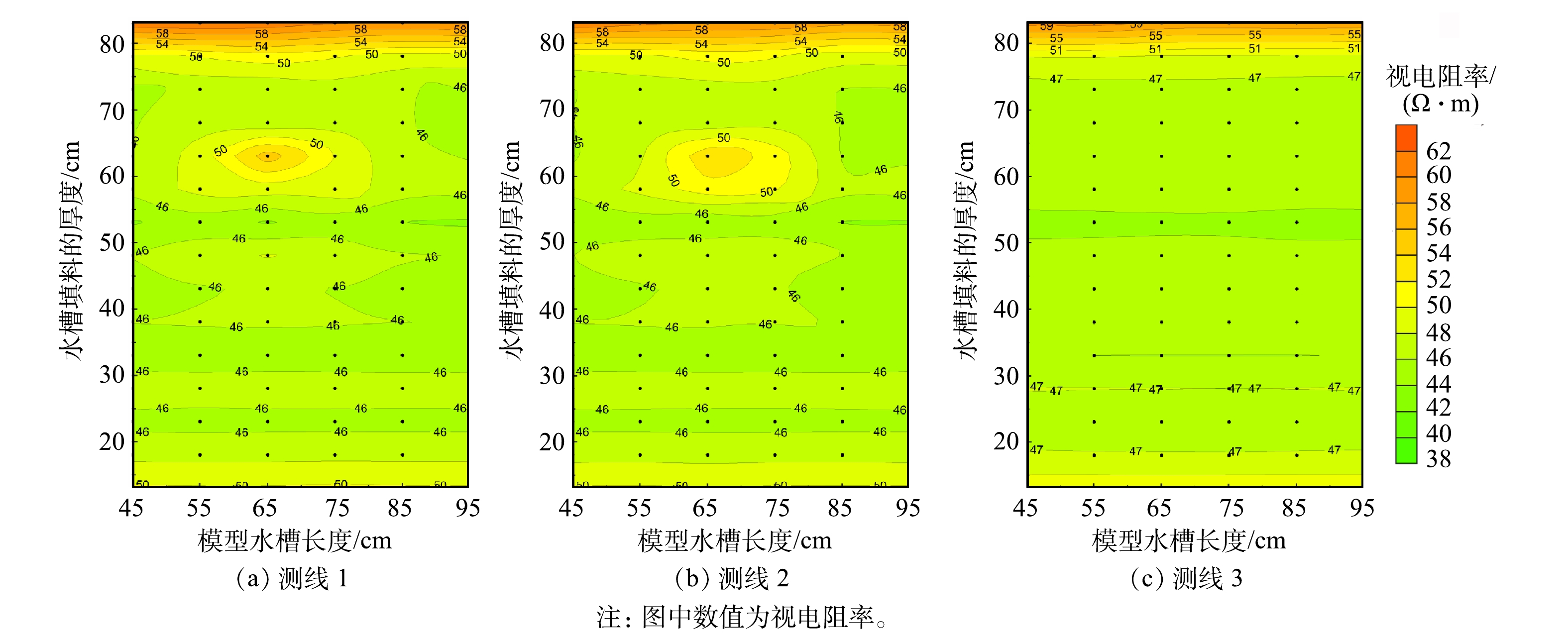
图 6 供电极距DAB/2=12.5 cm的视电阻率断面等值线图
Figure 6. Apparent resistivity cross-section contour map at the supply pole distance DAB/2=12.5 cm
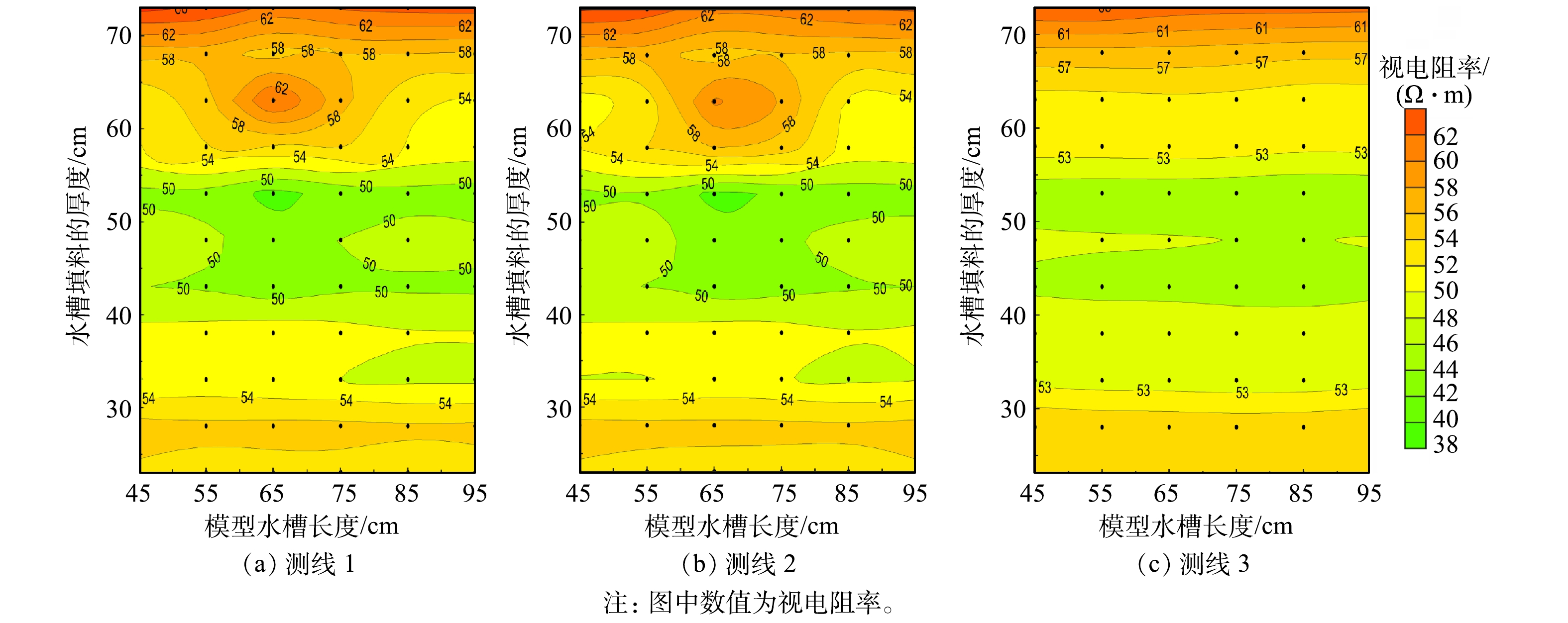
图 7 供电极距DAB/2=22.5 cm的视电阻率断面等值线图
Figure 7. Apparent resistivity cross-section contour map at the supply pole distance DAB/2=22.5 cm
-
[1] CORBELLA C, GARCÍA J, PUIGAGUT J. Microbial fuel cells for clogging assessment in constructed wetlands[J]. Science of the Total Environment, 2016, 569: 1060-1063. [2] MATOS M P, SPERLING M V, MATOS A T, et al. Clogging in constructed wetlands: Estimation of medium porosity by ground-penetrating radar[C]// 15th International conference on wetland systems for water Pollution Control. London: IWA Publishing, 2016: 4-9. [3] COOPER D, GRIFFIN P, COOPER P. Factors affecting the longevity of sub-surface horizontal flow systems operating as tertiary treatment for sewage effluent[J]. Water Science and Technology, 2005, 51(9): 127-135. doi: 10.2166/wst.2005.0303 [4] NIVALA J, KNOWLES P, DOTRO G, et al. Clogging in subsurface-flow treatment wetlands: Measurement, modeling and management[J]. Water Research, 2012, 46(6): 1625-1640. doi: 10.1016/j.watres.2011.12.051 [5] MATOS M P, SPERLING M V, MATOS A T, et al. Clogging in constructed wetlands: Indirect estimation of medium porosity by analysis of ground-penetrating radar images[J]. Science of the Total Environment, 2019, 676: 333-342. doi: 10.1016/j.scitotenv.2019.04.168 [6] TAPIAS J C, HIMI M, LOVERA R, et al. Assessing clogging development in infiltration-percolation systems for wastewater treatment by electrical resistivity and induced polarisation methods[J]. //EGU General Assembly 2013. EGU General Assembly Conference Abstracts. Austria, 2013: EGU2013-8050. [7] 张明珍, 徐栋, 武俊梅, 等. 人工湿地堵塞监测方法的研究进展[J]. 水生态学杂志, 2021, 42(3): 121-126. [8] MORVANNOU A. Dynamic modelling of nitrification in vertical flow constructed wetlands[D]. Brussels: Université Catholique de Louvain, 2012. [9] MORRIS R H, NEWTON M I, KNOWLES P R, et al. Analysis of clogging in constructed wetlands using magnetic resonance[J]. The Analyst, 2011, 136(11): 2283-2286. doi: 10.1039/c0an00986e [10] LAURENT J, BOIS P, NUEL M, et al. Systemic models of full-scale surface flow treatment wetlands: Determination by application of fluorescent tracers[J]. Chemical Engineering Journal, 2015, 264: 389-398. doi: 10.1016/j.cej.2014.11.073 [11] 李曼, 华国芬, 姬雨雨. 垂直流人工湿地堵塞和轮休过程中水流变化规律[J]. 水处理技术, 2017, 43(1): 57-61. [12] MARTÍN I, SALAS J J, SARDÓN N, et al. Research on clogging and effective surface in subsurface flow constructed wetlands[C]// 12th International conference on wetland systems for water Pollution Control. London: IWA Publishing, 2010: 4-8. [13] SMITH E, GORDON R, MADANI A, et al. Cold climate hydrological flow characteristics of constructed wetlands[J]. Canadian Biosystems Engineering, 2005, 47: 1.1-1.7. [14] WHITMER S, BAKER L, WASS R. Loss of bromide in a wetland tracer experiment[J]. Journal of Environmental Quality, 2000, 29(6): 2043-2045. [15] 张亮, 曹营渠, 易畅, 等. 人工湿地堵塞的研究进展[J]. 四川环境, 2017, 36(S1): 174-178. [16] AIELLO R, BAGARELLO V, BARBAGALLO S, et al. Evaluation of clogging in full-scale subsurface flow constructed wetlands[J]. Ecological Engineering, 2016, 95: 505-513. doi: 10.1016/j.ecoleng.2016.06.113 [17] 楚泽涵. 地球物理测井方法与原理[M]. 北京: 石油工业出版社出版, 2007: 26-42. [18] 程志平. 电法勘探教程[M]. 北京: 冶金工业出版社, 2007: 13-20. [19] ARCHIE G E. The electrical resistivity log as an aid in determining some reservoir characteristics[J]. Transactions of the AIME, 1942, 146(3): 54-62. [20] 丁彦礼, 李为一, 李文龙, 等. 一种小型可监测堵塞的人工湿地: 201820973071.3[P]. 2019-04-12. [21] 王帅兵, 张雪蕾, 李常斌, 等. 基于Visual MODFLOW的武威盆地地下水动态模拟及预测[J]. 兰州大学学报(自然科学版), 2015, 51(2): 159-165. [22] 郝治福, 康绍忠. 地下水系统数值模拟的研究现状和发展趋势[J]. 水利水电科技进展, 2006, 26(1): 77-81. doi: 10.3880/j.issn.1006-7647.2006.01.023 [23] 王庆永, 贾忠华, 刘晓峰, 等. Visual MODFLOW及其在地下水模拟中的应用[J]. 水资源与水工程学报, 2007, 18(5): 90-92. doi: 10.3969/j.issn.1672-643X.2007.05.023 [24] 何杉. Processing Modflow软件在地下水污染防治中的应用[J]. 水资源保护, 1999, 57(3): 16-18. [25] 白少元, 宋志鑫, 丁彦礼, 等. 潜流人工湿地基质结构与水力特性相关性研究[J]. 环境科学, 2014, 35(2): 592-596. [26] 贺映全, 曹红军, 胡武林, 等. 垂直流人工湿地基质堵塞分析与处理措施[J]. 山西建筑, 2019, 45(10): 175-176. doi: 10.3969/j.issn.1009-6825.2019.10.093 [27] 丁彦礼, 李为一, 韦益华, 等. 一种强化电阻率差异的人工湿地堵塞区域探测方法: 201810656942.3[P]. 2018-11-16. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 3670
- HTML全文浏览数: 3670
- PDF下载数: 87
- 施引文献: 0















